this is designed for the about link on the homepage to auto expand
Spring Forces
Introduction
The spring has been around for quite a while. It's used in all sorts of things like scales, shock dampeners, cars, etc. It's useful because it applies a larger force the more it's stretched or compressed, which gives it flexibility as well as allowing it to store energy. Engineers would tell you more, but this is a physics lesson and we'll mostly go over the physics of springs rather than the applications.
Spring Properties
First, a few general assumptions that are true of all springs. All springs have some "natural length" when they are not stretched or compressed. They also always exert a force that is opposite to the direction they're displaced. While it is possible to bend a spring, in physics this rarely happens and the intended use of the spring is usually to compress or stretch it. We will only be dealing with these two cases. In our cases, they are also always massless.
In the demo below, you can play with a few systems of springs. These springs look good and realistic, but they are not really what we're going to deal with. Our springs are always going to be ideal and not lose energy over time; these springs seem like they lose energy as the blocks oscillate. You can easily see this on your own, which is what I'll let you do. It is interactive, after all.
Spring Forces Demo
Hooke's Law
The most common type of spring you'll see is a Hookean spring, named after English polymath Robert Hooke. It involves a spring that exerts a force that linearly increases with the displacement of the spring from its equilibrium position. The formula for such a spring takes the form:
$$\vec{F_s} = -k \Delta \vec{x} $$ This does share the same notation with static friction, so we need to be careful to distinguish them. The relationships has been bestowed the name of Hooke's Law. The first thing you might notice is the negative sign. This actually just denotes the direction of the spring force, which is oppositely directed to the displacement from the natural length. This kind of force is called a restoring force and acts to attempt to return a system to equilibrium. The constant $k$ is called the spring constant (units $N/m$) which describes how strong the spring is.
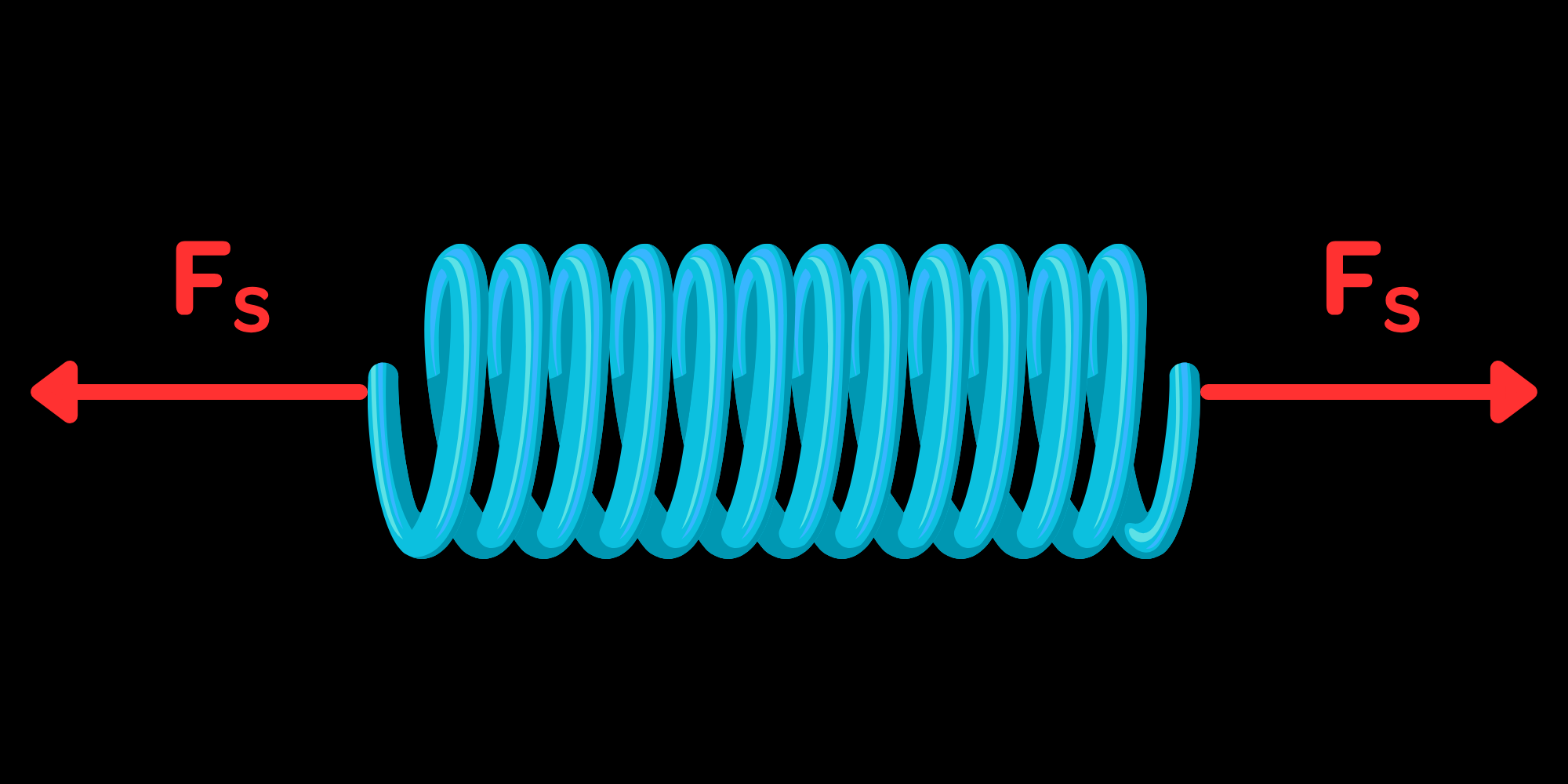
Much like a string, a spring will exert an equal force from both ends when pulled on. It actually exerts this same force across its entire length, a result we'll use later on to deduce what happens if you put multiple springs together.
Figure 1: A spring exerting an equal force from each end when stretched or compressed.
The spring is quite ubiquitous, as it can be oriented any number of ways and varied in number or strength in order to create a great variety of problems. Indeed, there are many basic dynamics and force analysis scenarios that can be modified just by including a spring. The spring we're going to talk about most often is one that's called Hookean, meaning that the force it exerts increases linearly with the stretch of the spring. This means the formula for such a spring is:
$$\vec{F_s} = -k \Delta \vec{x} $$
This is called Hooke's Law. The negative sign means that the force exerted will be in the opposite direction of the displacement from the spring's natural length, meaning that it tends to seek equilibrium. Most springs can either be compressed or stretched, so make sure to keep this in mind when figuring out the direction of the spring force.
Much like strings and tension, the spring exerts an equal spring force on both ends and at each point across the spring's length. This concept is used to determine how to deal with a combination of many springs. Analysis can lead to some complex results, but with proper reasoning it's not too difficult to understand how to get there.
Figure 1: A spring exerting an equal force from each end when stretched or compressed.
Now, the idea of springs might seem like a random addition, but I'm going to change that by tying it back to something we've learned all about in a previous lesson. By adding a spring to an inclined plane, we can make the problem more interesting.
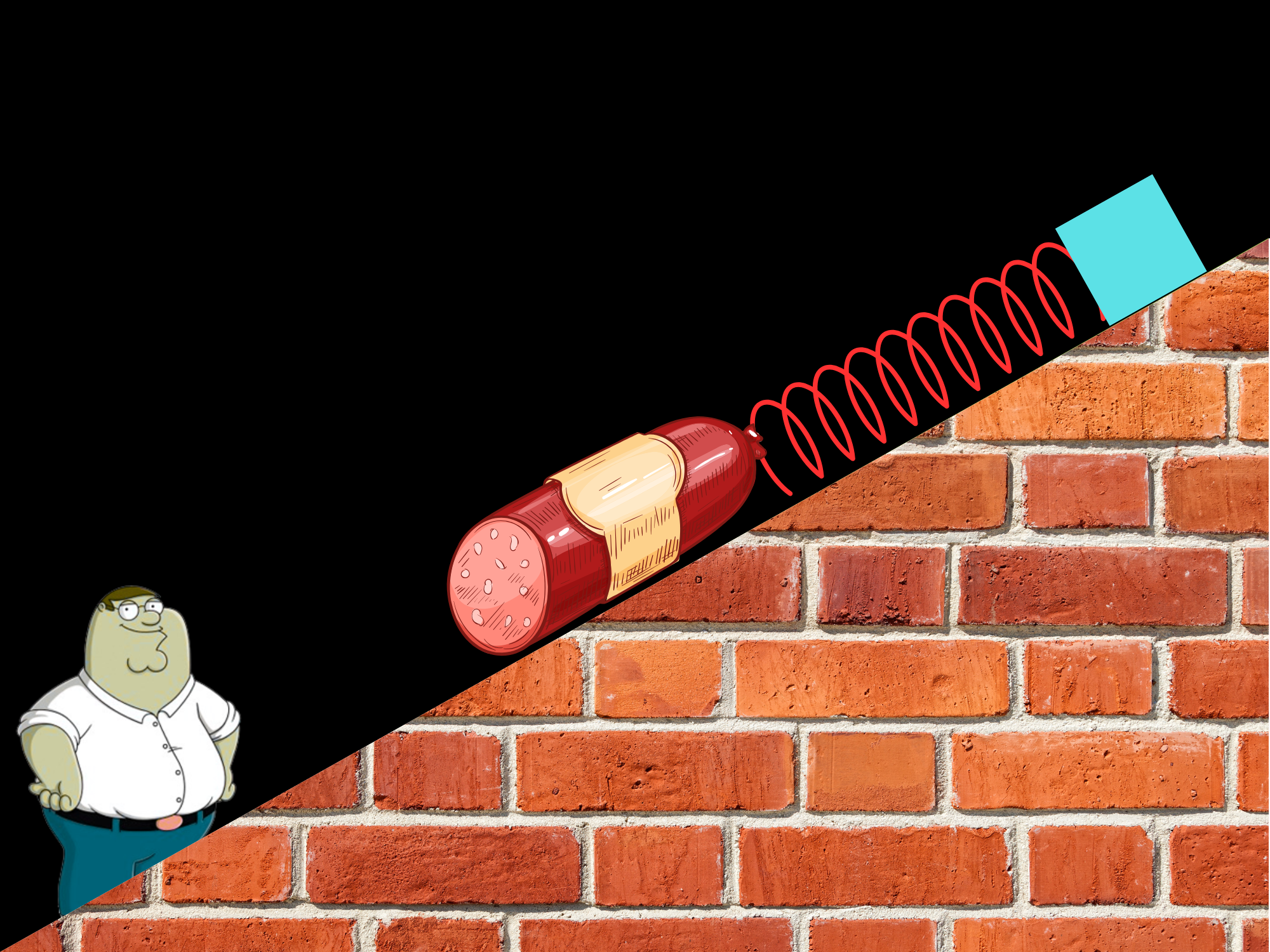
Mr. Greenfin has the bright idea to hang a 10 kg slab of salami from the tip of his house's roof, using a spring of negligible natural length as a support. His roof can be modelled as an inclined plane with incline angle 15° and a length of 2.5 meters (as measured along the inclined surface). What is the weakest spring that Mr. Greenfin can use such that the salami doesn't fall off the side of the roof? Assume there is no friction.
Figure 2: Mr. Greenfin's devious plan.
Now, this problem is just another inclined plane problem. The spring force is merely an addition to the already-existing forces of the inclined plane problem. Now, we know that the condition is that equilibrium is achieved just as the salami is about to fall off, meaning the spring stretched $x = 2.5 ~\textrm{m}$.
We can now do simple force analysis. For the y-direction, it is just like any other inclined plane problem, so we'll skip over this part. Besides, we're interested in the spring and it only acts in the x-direction. The x-direction equation can be written as such:
$$mg \sin \theta = F_s$$ $$mg \sin \theta = k x$$ Now, we can simply solve for $k$ here.
$$k = \dfrac{mg \sin \theta}{x} = \bbox[3px, border: 0.5px solid white]{25.5 ~\textrm{N/m} }$$ This is a pretty small minimum value! Most springs have a spring constant strength in the realm of $100 ~\textrm{N/m}$ to $1000 ~\textrm{N/m}$. Mr. Greenfin really didn't set his sights high on this one... Mr. Greenfin wants to hang a slab of salami of mass $m$ off the tip of his roof, for reasons he refuses to disclose. He uses a spring to keep the salami from falling off the roof, which is frictionless. The roof can be considered as an inclined plane with an incline angle of $\theta$ and a length as measured along the diagonal. What is the weakest spring he can use? Assume the spring's natural length is very short.
Figure 2: Mr. Greenfin's devious plan.
Since this is just an inclined plane with a spring throwin in, we can do simple force analysis. The maximum stretch of the spring is $L$, since if it stretches more than that the salami will fall off. For the y-direction, it is just like any other inclined plane problem, so we'll skip over this part. Besides, we're interested in the spring and it only acts in the x-direction. The x-direction equation can be written as such:
$$mg \sin \theta = F_s$$ $$mg \sin \theta = k x$$
Now, you might be wondering why I didn't have the negative sign that's present in Hooke's law. This is because the negative sign is only telling us direction, and we have already accounted for direction with our expression (the spring force is in the opposite direction as the component of gravity down the incline). Doing some algebra allows us to arrive at the answer relatively simply:
$$k = \bbox[3px, border: 0.5px solid white]{\dfrac{mg \sin \theta}{x}}$$ This problem was much harder than the ones at this level before! I wanted to give you a taste of what actual, quantitative force analysis feels like, just to see if you'd be comfortable doing it. Besides, there's not much to do conceptually with this problem. If you felt comfortable doing this, I reccomend moving up to our Algebra-Based level, as this analysis was very similar to the things happening at that level on a regular basis.
Spring Combinations
I want to introduce the idea of combinations of springs. For any combination of springs, we can replace the combination with a single spring that has the same effect as the whole combination. This single spring must have a spring constant equal to the effective spring constant $k_{eff}$ of the combination. The manner of calculating this constant is what we'll explore here.
Parallel Springs
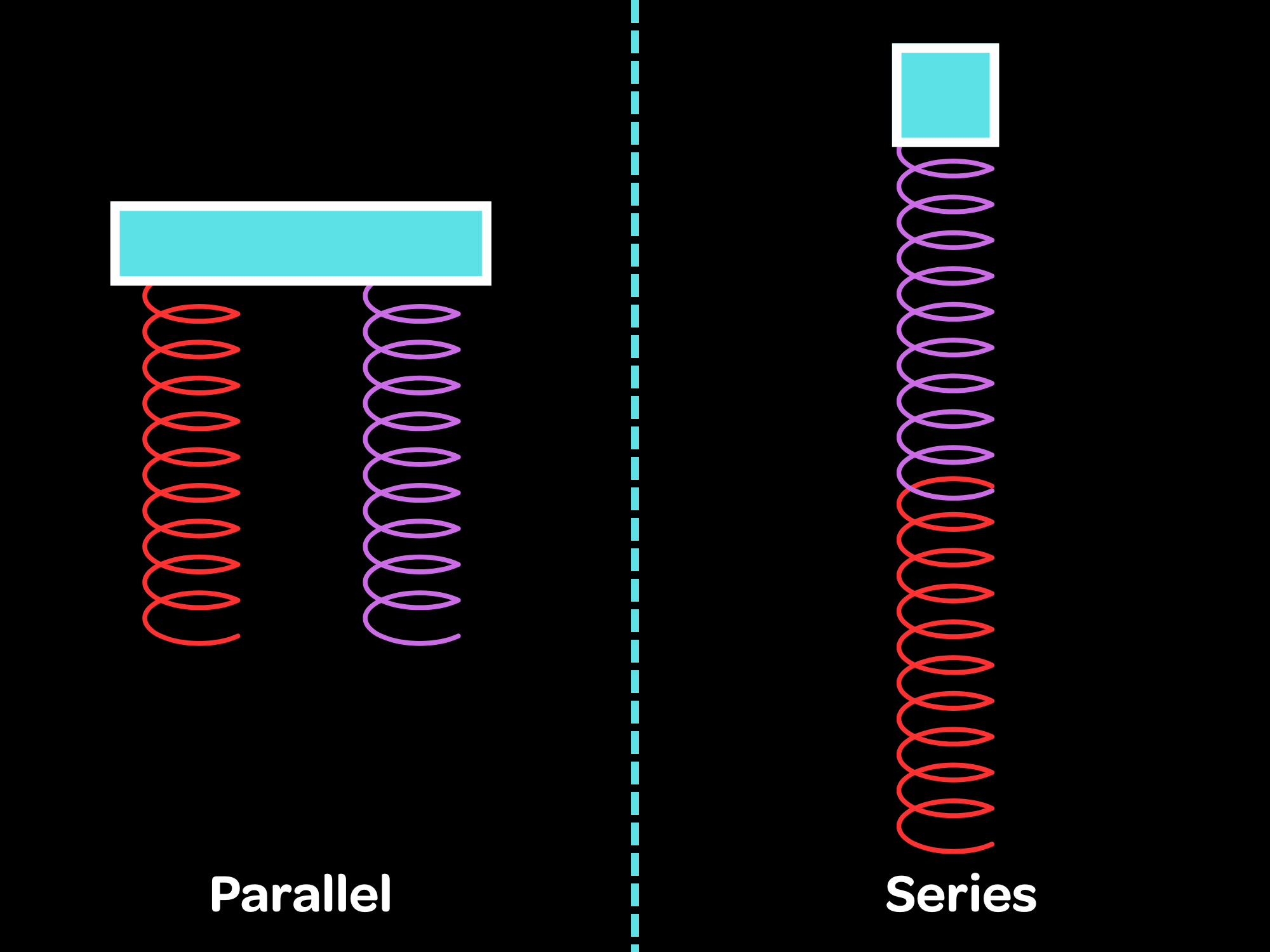
First, we have to define the two kinds of possible combinations. The first is a parallel combinations, which simply involves springs placed side-by-side. The other is the series combination, which involves springs connected end-to-end. The visual should help hammer home this idea.
Figure 3: Series versus parallel.
To derive the formulas for the effective spring constant of springs in series or parallel, we have to take a look at what happens to the connected springs when they are stretched. The parallel case is much simpler, but I will be showing you both. You cannot stop me.
The parallel case involves the same stretch for all the springs. If you look closely at how parallel springs are connected (side-by-side), this should be obvious. (We are assuming the stretch on the rod connecting all the springs is uniform, meaning the rod stays perpendicular to all the springs.) Since the stretch is constant, the total force exerted by all the springs is:
$$F = k_1x+k_2x+k_3x+...$$ This is equivalent to one spring stretched $x$ with effective spring constant:
$$k_{eff} = k_1 + k_2 + k_3 +...$$ This leads us to conclude that the effective spring constant for springs connected in parallel is the sum of their individual spring constants.
Series Springs
Similar reasoning can be used for the case of springs in series. However, this time the stretch of each spring isn't the same, but something else is. What this constant quanitity is often isn't immediately obvious. However, consider that each point of the entire combination is in equilibrium. This means the spring force of each spring is the same, since at the contact points between any two springs equilibrium conditions must be satisfied. Therefore, we can write:
$$F_s = ~\textrm{const.}= k_1x_1 = k_2x_2 = k_3x_3 = ...$$ Recall that each springs individually stretches some amount, so the total stretch $x$ is their sum.
This tells us that the reciprocal of the equivalent spring constant for springs connected in series is the sum of the reciprocals of the individual spring constants. (What a mouthful!)
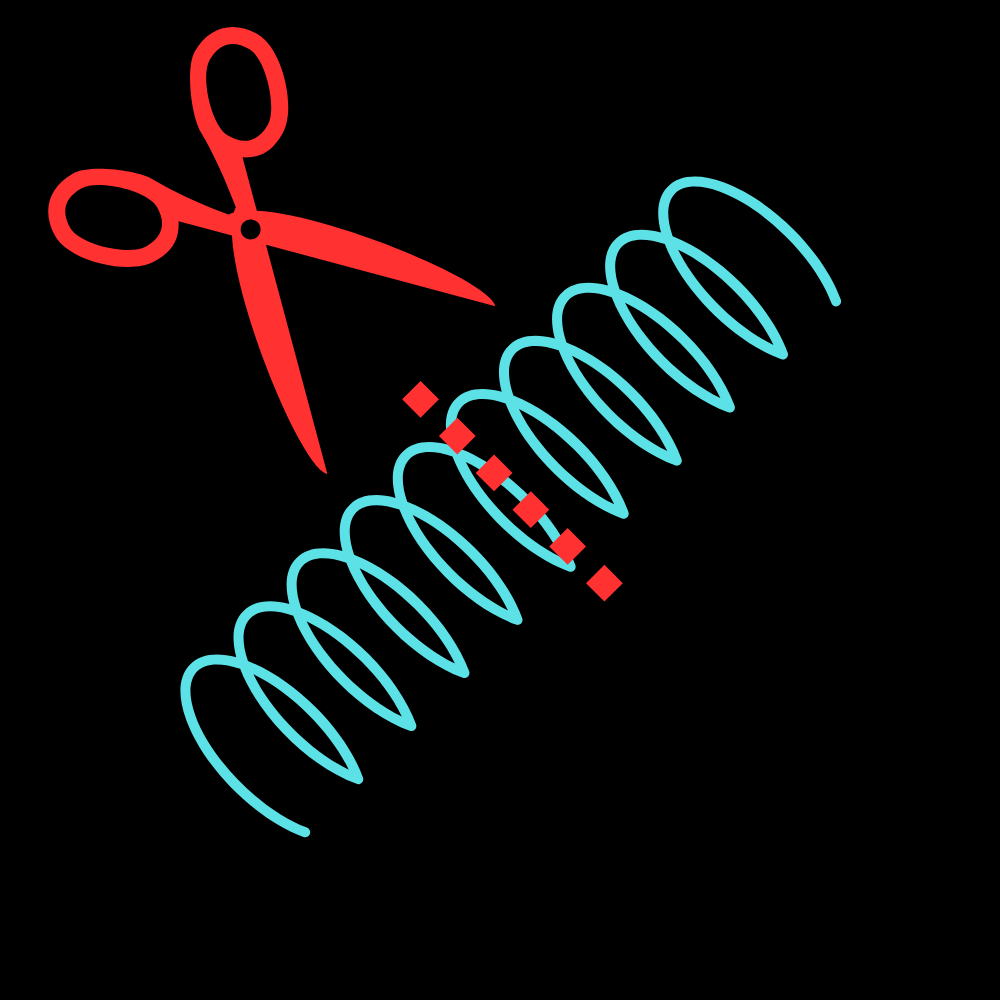
You cut a spring of spring constant $k$ in half. What is the spring constant of each of the two half-springs? (Think about what this is equivalent to!)
Figure 4: Cutting a spring in half.
Cutting a spring in half produces two identical half-springs. We can reverse this logic to conclude that the original spring is a series combination of two of these half-springs, which we'll say have a spring constant of $k_h$. Therefore:
$$\dfrac{1}{k} = \dfrac{1}{k_h} + \dfrac{1}{k_h}$$ $$\dfrac{1}{k} = \dfrac{2}{k_h}$$ $$\bbox[3px, border: 0.5px solid white]{k_h = 2k}$$ This means that cutting a spring in half doubles its effective spring constant!
Deriving the equations for how to treat combinations of springs in series or parallel requires rigorous logic and mathematical reasoning, which is a little beyond the scope of our conceptual understanding. Nevertheless, I will walk through the basics of the logic behind each result.
For springs in parallel, each spring exerts a force directly on the object because they're all directly connected to it (refer to the diagram above), meaning adding springs should make the force stronger. The exact reasoning to derive the effective spring constant for parallel springs uses the fact that all the springs stretch the same amount since they're side by side, but we won't be going into the math. The result we get is:
$$k_{eff} = k_1 + k_2 + k_3 +...$$ In other words, the effective spring constant of springs in parallel is the sum of the individual spring constants.
Series Springs
The result for springs in series is a little more complicated. See, for springs in series only one spring is connected to and directly acts on the object. However, throughout the entire series of springs the force has to remain the same because of equilibrium conditions, meaning each spring exerts the same force.
The total stretch $x$ is the sum of all of the individual stretches and the effective spring constant is defined such that $k_{eff} x = F_s$, and since $x$ is large due to it being a sum $k_{eff}$ is smaller than any individual spring constant. Also, it tends to get smaller the more springs you add because that increases the total stretch $x$. The relation that we end up getting is complex, but it follows this rule.
This relation is complicated. It tells us that the reciprocal of the equivalent spring constant for springs connected in series is the sum of the reciprocals of the individual spring constants. (What a mouthful!) It's probably easier just to look at the equation than try to put it into words.
Conclusion
Now, with springs fully covered, we can move on from this long (but important!) unit and finally begin to talk about something new. The second unit, which is also considered one of the hardest and most crucial units in all of mechanics, is now finally complete, but the next unit is still centered around forces, albeit very special ones. So, if you're ready, let's jump right into circular motion and gravitation!