this is designed for the about link on the homepage to auto expand
Rolling Without Slipping
Introduction
What exactly causes something to roll? Well, with this demo we'll explore that. Go and put the wheel on the different surfaces and try to get it to start rolling. Change the slider parameters to see what happens. Hopefully you get an understanding of what the factors that affect rolling are.
Rolling Motion Demo
You might have noticed that sometimes the wheel rolled very smoothly, while at other times it would slip while rotating. There is an obvious difference between these two kinds of motion. The first is what we call rolling without slipping, and the second is rolling with slipping. The first case is much more interesting, as it satisfies a number of interesting conditions.
Characteristics of Rolling
The rolling without slipping case involves smooth motion of the ball. It almost seems as if the rotational and translational motions are in lock-step. In fact, that's exactly what's happening. The rotational and linear motions of the ball are connected when this conditions is satisfied.
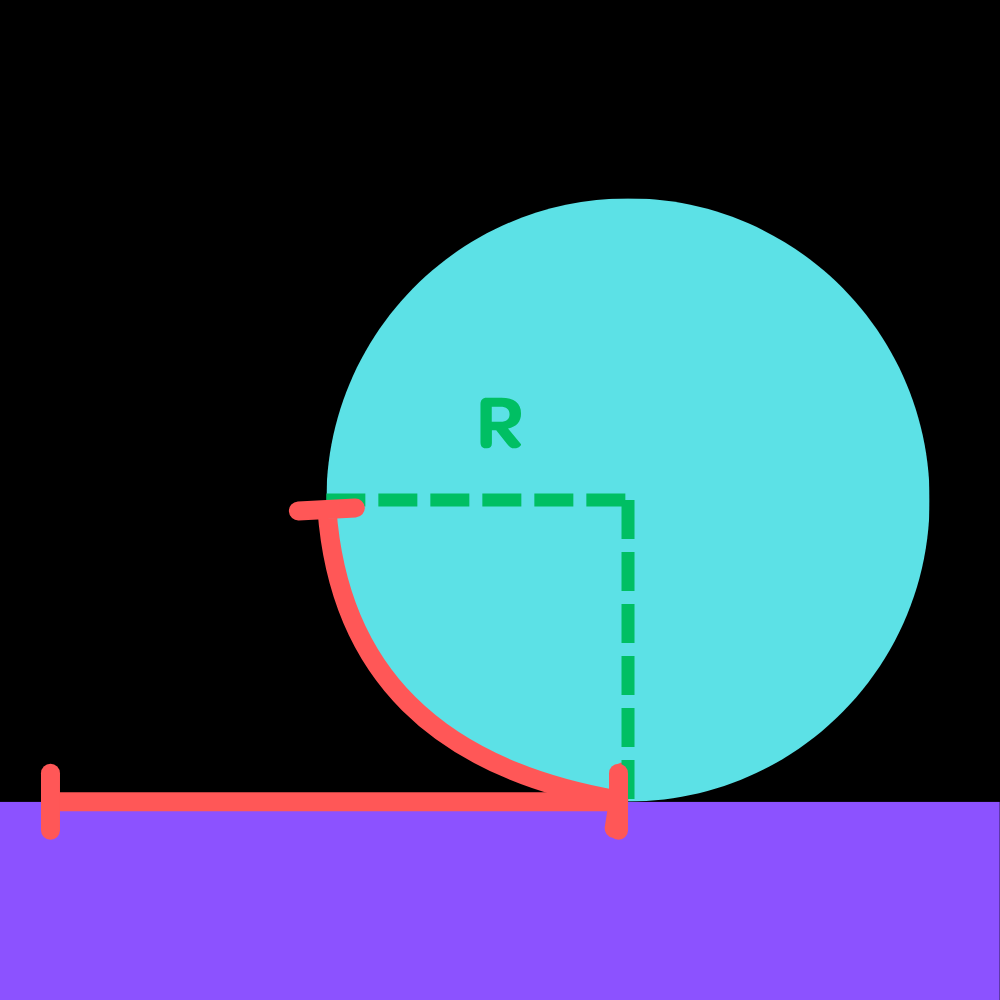
Because the rolling object does not slip, the distance travelled on the ground is related to the number of revolutions the object has gone through. Specifically, the distance that has been travelled is equal to the radius of the object times the angle it has rotated through. This is satisfied because there is no slipping between the two surfaces. It's kind of like unravelling a spool of string on the ground: the length of the string on the ground is related to how many times the spool has spun.
Figure 1: The distance traced along the ground is the same as the arc length. The red length is the same on the circle as on the ground. This is in part due to the fact that at each instant, the point in contact with the ground is stationary relative to it. (That's why there's no slipping!) You can think of the object as "imprinting" itself on the ground as it rolls.
Also, rolling without slipping is impossible without friction. You might have noticed this from the demo, but even in real life you can't roll something on a low-friction surface like ice. This is because static friction (yes, static!) is required to keep the lowermost point of the rotating object from slipping with respect to the ground, and is also responsible for keeping it in place so the parts of the object around that point can "roll" around it.
However, this kind of friction doesn't cause the ball to lose any mechanical energy because it is static. Rather, it actually still maintains a state of energy conservation, as all it does is allow the object to roll. Typically, only kinetic friction causes a loss in mechanical energy. This is all probably very confusing to you right now, but I promise I'll talk more on this later. We need some more ground rules first.
Connecting Linear and Rotational Aspects of Rolling
Anyway, this lets us write an equation that relates displacement $x$ of the object's center to the angle it has rolled through.
$$ x = R \theta $$ This might look a bit familiar to the equations we used to relate linear and angular quantities, but this time the linear quantites describe the center of mass rather than just the point we're looking at. Knowing equation also lets us write two others for velocity and acceleration, since they are related to position. Recall that these are all quantities describing the motion of the center of the rolling object, not the edge.
$$ v = \omega R$$ $$ a = \alpha R $$ These three equations can describe the kinematics of a rolling object. However, we need to do a bit more in order to find the general method governing these rolling objects. This will require us to employ rotational dynamics techniques while the three equations above hold. Because the object rolls smoothly and doesn't slip, we can conclude a few things. The rotational and linear motion of the object must be related somehow because of the smooth rolling. In fact, they're related in that the distance the ball travels (technically the distance the center of the ball travels) is the same as the distance traced out along the surface of the ball while it rolls. Here's a diagram to explain what that means:
Figure 1: The distance traced along the ground is the same as the arc length.
Connecting Linear and Rotational Aspects of Rolling
This is an essential part of rolling without slipping and only applies if that condition is satisfied. Now that we know this information, we can write a few things about the center of the object. These look like the equations we've seen before in rotational kinematics, but they describe the motion of the object's center, not one of the points on it.
$$ x = R \theta $$ $$ v = \omega R $$ $$ a = \alpha R $$ Also, note that without friction rolling is impossible. If you've ever tried to roll something on ice, you'll know that it begins slipping very easily. This is because friction plays a key role in forcing the object to start rolling.
Kinematics isn't enough to get us a thorough analysis of the situation, however. We need to consider the forces on the ball with an application of rotational dynamics in order to solve the problem. Buckle up, because we're heading into the harder stuff!
The Axis of Rotation
First, I want to pose an important question. How exactly does the ball roll? Which point does it rotate around? The answer is not what you might think at first, and is very deceptive. However, it's also the key to understanding rolling!
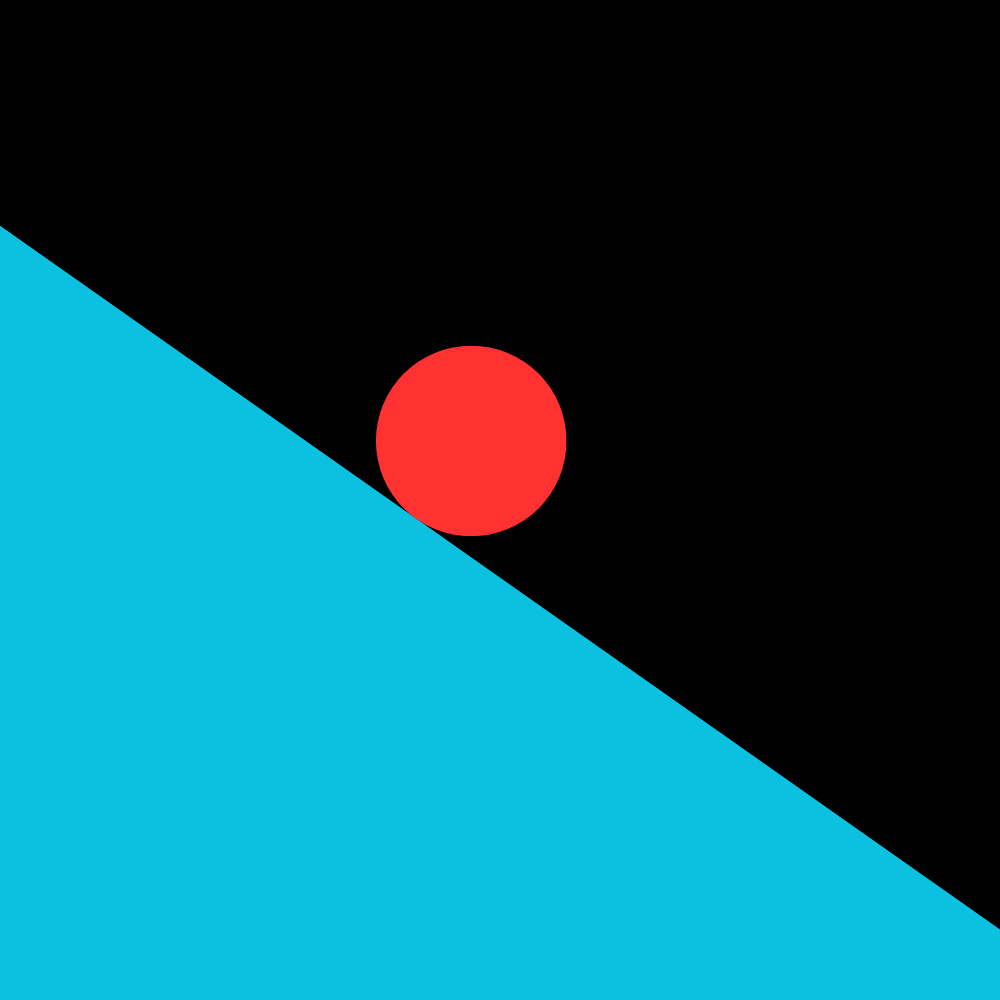
Let's take a look at a ball rolling down an incline. This is a pretty simple case that you've all probably seen before in the real world, so it should be familiar to you.
Figure 2: So the ball rolls. It might seem like the ball rotates around its center while rotating. In fact, mathematically we can actually treat it as if the ball is rotating around the center, but this isn't what happens in reality! Many people still use this technique because it makes more sense to them, but I believe using the correct rotational axis actually makes the math easier. Where it's actually rotating around might seem surprising, but will make sense later.
First of all, let's talk about the "easier" method of dealing with rolling. This involves splitting it up into rotational and translational motion, and considers the object as rotating around its center while the center has some speed. This just involves using those three kinematics relations we got earlier and can be helpful, but really is not the full picture.
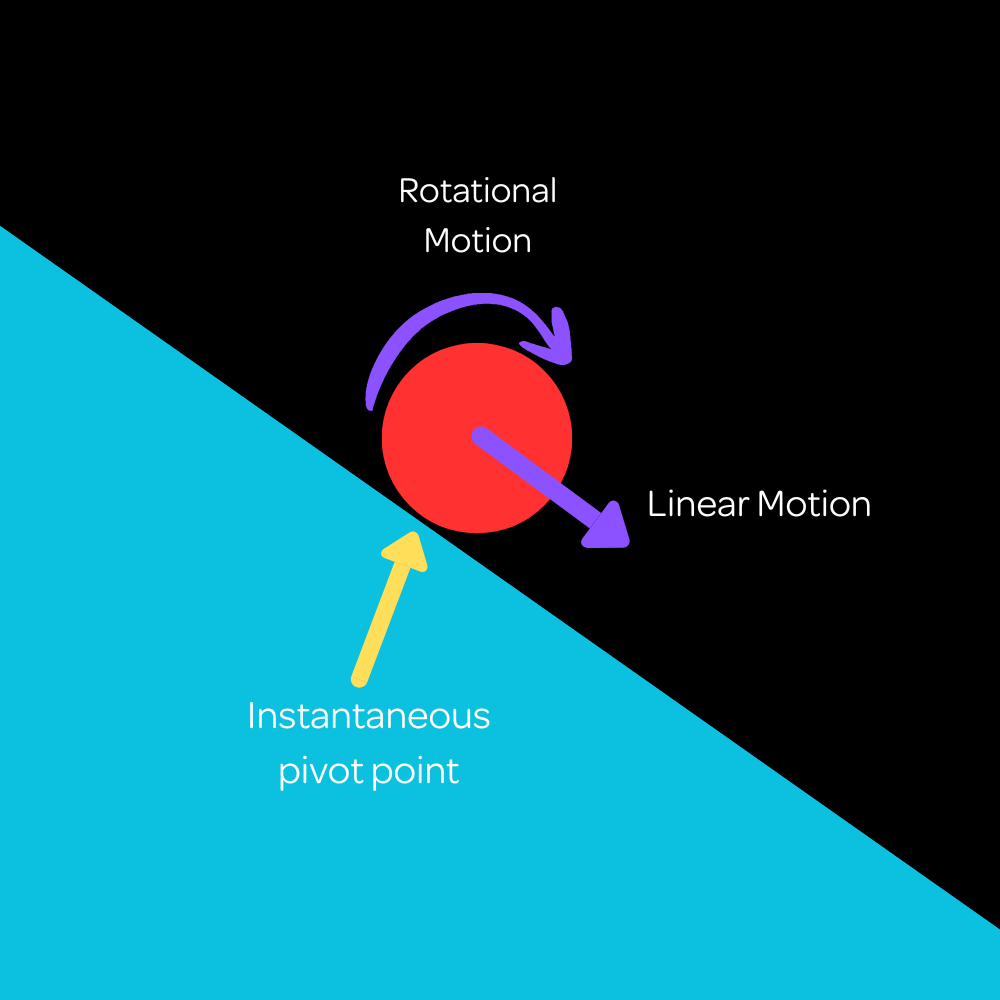
The problem can actually be broken down into pure rotation about the axis where the ball contacts the surface. This is the only possible axis through which the object can rotate, because it's the only point of contact! We can break this down into a superposition of linear and rotational motion as I explained above, or (my personal preferred method) just use this axis and deal with it.
Figure 3: It's really spinning. Really. Of course, the point that contacts the ground changes as the ball rolls, which is why it's labelled an instantaneous pivot point. However, because objects that roll tend to have very high symmetry (because they're circular), the pivot point/pivot axis has the same moment of inertia at all times. It's always going to be at the edge of a circle, which is practically the same point no matter how the circle rotates.
Of course, non-circular objects can also "roll", but their motion is much more complex and not uniform. If you've rolled a hexagonal pencil, you'll know that it rolls somewhat smoothly, but its motion is much less uniform than that of a cylindrical pencil. For squares, the result is even more extreme. The reason for this is because the object's center of mass has to lift a certain distance in order to actually be able to roll over onto its next side, which means its speed will change. You'll know this if you've ever tried to roll a square or rectangular object.
Anyway, back to the regularly scheduled discussion of rolling with circular objects.
This means that the effective moment of inertia of the object is not the inertia about its center, but rather the inertia of a parallel axis a distance of one radius $R$ from the center. That means the moment of inertia has changed to be $MR^2$ more than the usual, according to the parallel-axis theorem. This is important to keep in mind when using this method of solving objects that are rolling.
Practice Problems
What is the speed at the top of a cylinder that rolls along the ground with a center-of-mass velocity equal to $v$?
This one can be tricky, but is much easier if you apply what I talked about previously with the axis of rotation.
Hopefully, you could figure out how to do it. Essentially, we already know we have the equation:
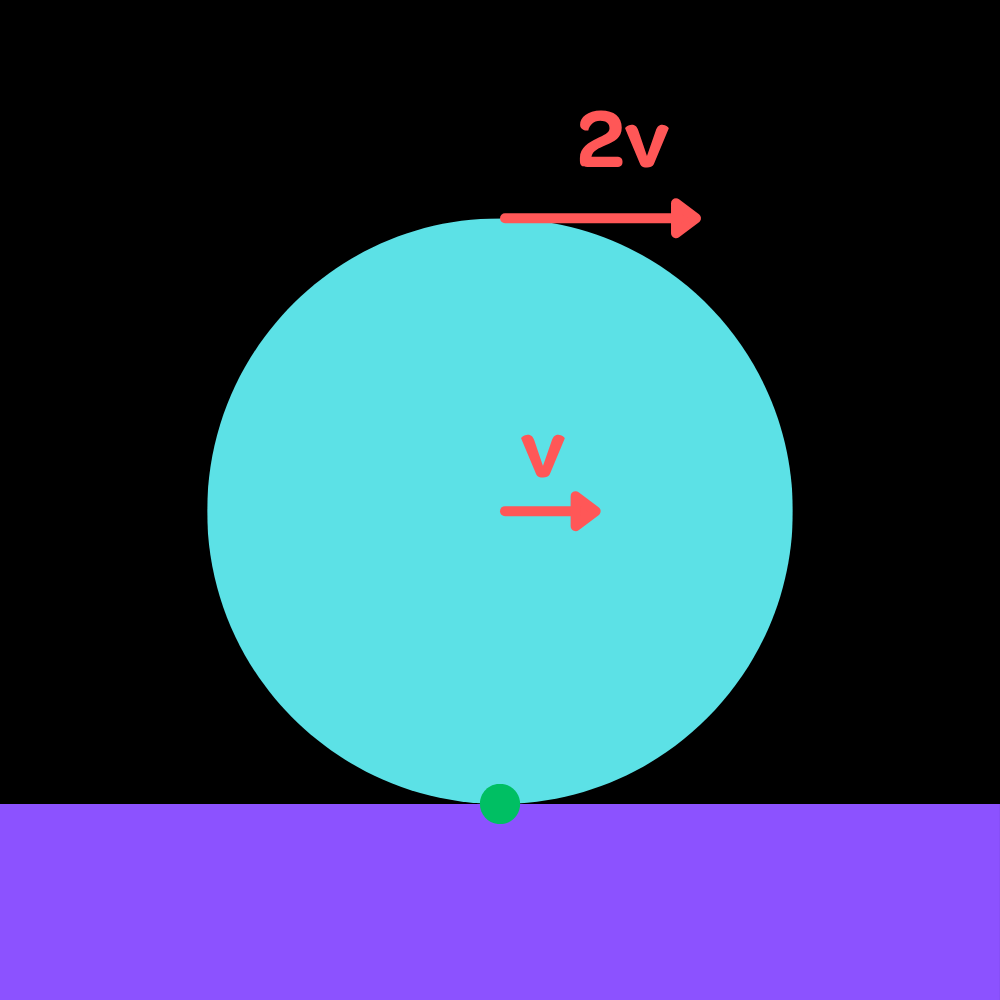
$$ v = \omega R $$ Since we know the bottom of the cylinder is where the instantaneous axis of rotation is located, the center is going to be a distance $R$ from that point. Do we see something emerge now? The equation we got previously for the center (which is a distance $R$ from the axis of rotation) is really the same formula we got in rotational kinematics, only applied to the real axis of rotation at the point of contact!
Once we understand this, we realize that the top of the cylinder is one diameter away from the axis of rotation, or a distance of $2R$ from it. This lets us write the velocity at the top of the cylinder $v_t$ using the same kinematics relation:
$$ v_t = \omega (2R) = \bbox[3px, border: 0.5px solid white]{2 v} $$ Here's a diagram to sum things up nicely:
Figure 4: Double the radius, double the speed!
That was a good simple problem, but not really a "true" rotation problem by algebra standards. Now, let's tackle a much more challenging problem by actually applying the idea that friction is required for rolling to our calculations.
What is the minimum coefficient of friction required for a solid ball to be able to roll down a ramp inclined at $\theta = 30 \degree$?
This problem sounds simple, but is really not as simple as you might expect! It's hard to see what the proper approach to this problem should be, but I'm here to show you my preferred method for tackling these problems.
First, we can consider the forces on the ball. We've got gravity, the normal force, and the frictional force. Gravity is pointed straight downwards at the center of mass, and the two other forces are located at the point of contact. We'll do our basic force analysis first, then deal with the torques on the object.
The forces on this are no different than a regular object moving down an incline plane in the presence of friction. In the y-direction (remembering to tilt our axes) we have a component of gravity and the normal force.
$$ mg \cos 30 \degree = F_N $$ In the x-direction, we have a component of gravity and the frictional force. They are not going to be equal, since we know the ball moves down the incline. Thus, we can use the Second Law: $$ mg \sin 30\degree - \mu F_N = m a $$ We can combine the two force-balance equations to solve for the acceleration. You should be familar with this by now, so I'm going to omit most of the algebra. Look back at our inclined plane unit if you need a refresher.
$$ a = g\left( \dfrac{1-\mu \sqrt3}{2} \right)$$ Now, we want to deal with torques. Again, we have gravity at the center of mass and the two other forces at the point of contact. It's beneficial for us, then, to work with the point of contact as our axis of rotation, since we can ignore the two forces placed there in that context. Do you see why I prefer this method now?
Only the component of gravity parallel to the incline has any torque around the contact point, which means that the total torque is just equal to $\tau = mg \sin 30 \degree \cdot r $. This allows us to write Newton's Second Law in rotational form:
$$ mg \sin 30 \degree \cdot r = I \alpha $$ Keep in mind that we're dealing with the axis that goes through the point of contact for a solid sphere, which means that the moment of inertia here is $I = \frac{2}{5}mr^2 + mr^2 = \frac{7}{5} mr^2 $. Therefore, we finish the equation:
$$ \dfrac{mgr}{2}= \dfrac75 mr^2 \alpha $$ For rolling without slipping, $a = \alpha r$. We can therefore rewrite the previous equation, simplifying as we do so:
$$ \dfrac{mg}{2}= \dfrac75 m a $$ $$ a = \dfrac{5}{14}g $$ This acceleration has to be the same as the acceleration we calculated using force analysis. $$ \dfrac{5}{14} g = g\left( \dfrac{1-\mu \sqrt3}{2} \right)$$ $$ \dfrac57 = 1- \mu \sqrt3 $$ $$ \mu = \bbox[3px, border: 0.5px solid white]{\dfrac{2}{7 \sqrt 3} }$$ Phew!
Conclusion
That's it for this special case of rotational dynamics! Rolling is a very common type of motion, so it only makes sense that we analyzed it extensively here. If you prefer, you can treat the rotational axis as being at the center of mass, but I personally prefer setting it where it actually is. At the end of the day, one might be easier to understand, but the other makes your mathematical life much easier.
We're moving on to talking about a few new topics in the next lesson that are pretty foundational. They are related to the concepts of energy and momentum which we learned earlier, but in rotational form. (You might be seeing a pattern...)