Lessons
Problems
Getting Started
- About Us
- Getting Started
- Basic Algebra
- Metric Prefixes
- Trigonometry
- Index/Glossary
Mechanics
Kinematics
- Vectors
- Dimensional Analysis
- Position, Velocity, Acceleration
- One-Dimensional Motion/Free fall
- Two-Dimensional Motion/Projectile Motion
- Relative Velocity
Dynamics
- Newton's Laws
- Forces
- F=ma and Free-body Diagrams
- Inclined Planes and Pulleys
- Spring Forces
Circular Motion and Gravitation
- Centripetal Force/Acceleration
- Fictitious Forces
- Newton's Law of Universal Gravitation
- Kepler's Laws
Energy
- Dot Product
- Definition of "Work"
- Definition of Energy and Energy Conservation
- Types of Equilibrium
- Definition of Power
- Universal Gravitational Potential Energy
Momentum
- Impulse/Momentum Theorem
- Conservation of Linear Momentum
- Center of Mass
- Collisions
- Explosions
Rotation
- Rotational Kinematics
- Torque
- Moment of Inertia
- Rotational Dynamics
- Rolling Without Slipping
- Rotational Kinetic Energy and Angular Momentum
Oscillations
- Simple Harmonic Motion
- Spring-Block Oscillators
- Pendulums
- Other Oscillators
Fluids
- Properties of Fluids
- Pressure
- Fluid Flow
- Bernoulli's Principle
- Air Resistance and Drag
Electricity & Magnetism
Electrostatics
- Electric Charge
- Coulomb's Law
- Electric Fields
- Gauss's Law
Thermodynamics
Lessons
Problems
Getting Started
- About Us
- Getting Started
- Basic Algebra
- Metric Prefixes
- Trigonometry
- Index/Glossary
Mechanics
Kinematics
- Vectors
- Dimensional Analysis
- Position, Velocity, Acceleration
- One-Dimensional Motion/Free fall
- Two-Dimensional Motion/Projectile Motion
- Relative Velocity
Dynamics
- Newton's Laws
- Forces
- F=ma and Free-body Diagrams
- Inclined Planes and Pulleys
- Spring Forces
Circular Motion and Gravitation
- Centripetal Force/Acceleration
- Fictitious Forces
- Newton's Law of Universal Gravitation
- Kepler's Laws
Energy
- Dot Product
- Definition of "Work"
- Definition of Energy and Energy Conservation
- Types of Equilibrium
- Definition of Power
- Universal Gravitational Potential Energy
Momentum
- Impulse/Momentum Theorem
- Conservation of Linear Momentum
- Center of Mass
- Collisions
- Explosions
Rotation
- Rotational Kinematics
- Torque
- Moment of Inertia
- Rotational Dynamics
- Rolling Without Slipping
- Rotational Kinetic Energy and Angular Momentum
Oscillations
- Simple Harmonic Motion
- Spring-Block Oscillators
- Pendulums
- Other Oscillators
Fluids
- Properties of Fluids
- Pressure
- Fluid Flow
- Bernoulli's Principle
- Air Resistance and Drag
Electricity & Magnetism
Electrostatics
- Electric Charge
- Coulomb's Law
- Electric Fields
- Gauss's Law
Thermodynamics
Rotational Kinetic Energy and Angular Momentum
Introduction
Believe it or not, rotating objects have kinetic energy as well. This is the rotating counterpart to translational kinetic energy ($K = \frac12 mv^2$) and arises due to the kinetic energy of each individual point on a rotating object. This is often hard to calculate however, so we just use a catch-all formula to describe the kinetic energy of rotation. Something can have both translational and rotational kinetic energy, as you might have expected.Rotational Kinetic Energy
The basic equation for rotational kinetic energy is quite simply defined as:$$ K = \dfrac12 I \omega^2 $$
Another case where the rotational quantity is analogous to the linear one. Of course, we can't talk about energy without also talking about work. Torque can do work as well, which often is converted into rotational kinetic energy. The formula is:
$$W = \tau \Delta \theta $$
There's an integral form of this as well, as you probably guessed.
$$ W = \int_{\theta_i}^{\theta_f} \tau ~d\theta $$
Of course, we can't forget about power. I bet you could have guessed this formula without me showing it.
$$ P = \tau \omega $$
None of these are new quantities! They are not the rotational analogues of what we already know. Kinetic energy is still just energy, and work is the same work described by the formula $W = F \cdot x$. These are simply new ways of calculating these quantities when rotation is involved.
This is all pretty elementary stuff that only builds off of what we already know, so I won't go too much into depth about it. These ideas are important, but not difficult or lengthy enough to warrant their own section, so I've grouped them in with angular momentum. Speaking of that, the next concept (angular momentum) is much more complex and interesting.
Before we move on, though, let's try a short practice problem.
What is the total kinetic energy of a hollow ball of mass $m$ and radius $R$ that rolls with some speed $v$ without slipping?
This hearkens back to our last lesson, so I hope you were paying attention there. There are two ways to go about this. The first is to consider both the linear motion of the ball and treat the rotational motion as if it were around the center of the object. In this case, the linear speed of the ball is $v$ and the angular velocity of the ball is $\omega = v/r$.
$$ K = \dfrac12 mv^2 + \dfrac12 \left( \dfrac{2}{3} m r^2\right) \left( v/r \right)^2$$ $$ K = \dfrac12 mv^2 + \dfrac13 m v^2 = \bbox[3px, border: 0.5px solid white]{\dfrac{5}{6} mv^2} $$
The other method is the one I like better. Consider the motion as just pure rotation around the point of contact with the ground. We can the write the kinetic energy as just one term: the rotational kinetic energy around that point.
$$ K = \dfrac12 \left( \dfrac{5}{3} mr^2 \right) \left( v/r \right)^2 $$ $$ K = \bbox[3px, border: 0.5px solid white]{\dfrac{5}{6} mv^2} $$
This hearkens back to our last lesson, so I hope you were paying attention there. There are two ways to go about this. The first is to consider both the linear motion of the ball and treat the rotational motion as if it were around the center of the object. In this case, the linear speed of the ball is $v$ and the angular velocity of the ball is $\omega = v/r$.
$$ K = \dfrac12 mv^2 + \dfrac12 \left( \dfrac{2}{3} m r^2\right) \left( v/r \right)^2$$ $$ K = \dfrac12 mv^2 + \dfrac13 m v^2 = \bbox[3px, border: 0.5px solid white]{\dfrac{5}{6} mv^2} $$
The other method is the one I like better. Consider the motion as just pure rotation around the point of contact with the ground. We can the write the kinetic energy as just one term: the rotational kinetic energy around that point.
$$ K = \dfrac12 \left( \dfrac{5}{3} mr^2 \right) \left( v/r \right)^2 $$ $$ K = \bbox[3px, border: 0.5px solid white]{\dfrac{5}{6} mv^2} $$
Angular Momentum
Angular momentum is a kind of momentum of rotating objects. Unlike the energy concepts we covered previously, it is separate from linear momentum and follows its own rules. We also have a conservation law for angular momentum, but the criterion for the conservation of angular momentum is slightly different.As you might guess, the angular momentum hinges on the idea of moment of inertia and angular velocity. The general formula for an object is:
$$ L = I \omega$$
Angular momentum is conserved whenever there is no net external torque on the system, as you might have guessed.
The Law of Conservation of Angular Momentum:
Angular momentum is conserved about an axis when there is no net external torque about that axis.
Angular momentum is conserved about an axis when there is no net external torque about that axis.
So far, this mirrors the conditions and definitions for plain old regular momentum, which we covered in depth in our last section. The only thing is, we have to consider torque about a specific axis, since angular momentum is measured around a particular axis.
Angular Momentum of Translating Objects
But here's where it gets interesting! You can actually have angular momentum for objects moving in a line! Here's a demo to show that off. The ball moves in a line, but can give the rod some angular momentum (by causing it to spin) when it collides with it! Try throwing the ball at the rod to see what happens.Angular Momentum Demo
You're also able to dynamically change the moment of inertia, but that can lead to some wacky results (as would be expected, since you can't just change the moment of inertia all willy-nilly in the real world).
The rod obviously gains some angular momentum after the ball collides with it! This means that the ball transferred angular momentum to the rod, despite only having moved in a straight line! Indeed, any object has angular momentum as long as it's moving. This angular momentum is defined relative to the axis of rotation:
$$ L = \vec{p} \cross \vec{r} = mvh $$
I've defined $h$ as the "height" that the ball is from the center of rotation. Of course, we aren't always going to be dealing with the y-direction, but it's just a more concrete way of visualizing the cross product. This essentially states that the angular momentum is equal to angular momentum that the ball would have at the point of impact, if it were to rotate about that particular axis.
The cross product definition above is technically the more general form of angular momentum, but our $L = I \omega$ works better for rigid objects. The above formula really only works well for point objects, as we would have to apply that formula to each point in a rigid body to find the total angular momentum. And that takes calculus, not to mention a whole lot of work.
Note that we can choose any reference point for angular momentum of a ball moving in a line. We are almost always going to just choose the point where the system would rotate around, but keep in mind that the choice of rotational axis is arbitrary. Moreover, we also sometimes need to choose the axis around which there is zero net external torque such that angular momentum is actually conserved.
Direction of Angular Momentum
Well, regular momentum has a direction, so angular momentum should have one as well, right? Well, yes, but it's not in the direction that you might expect! Instead of being in the plane of rotation, it points out of the plane of rotation!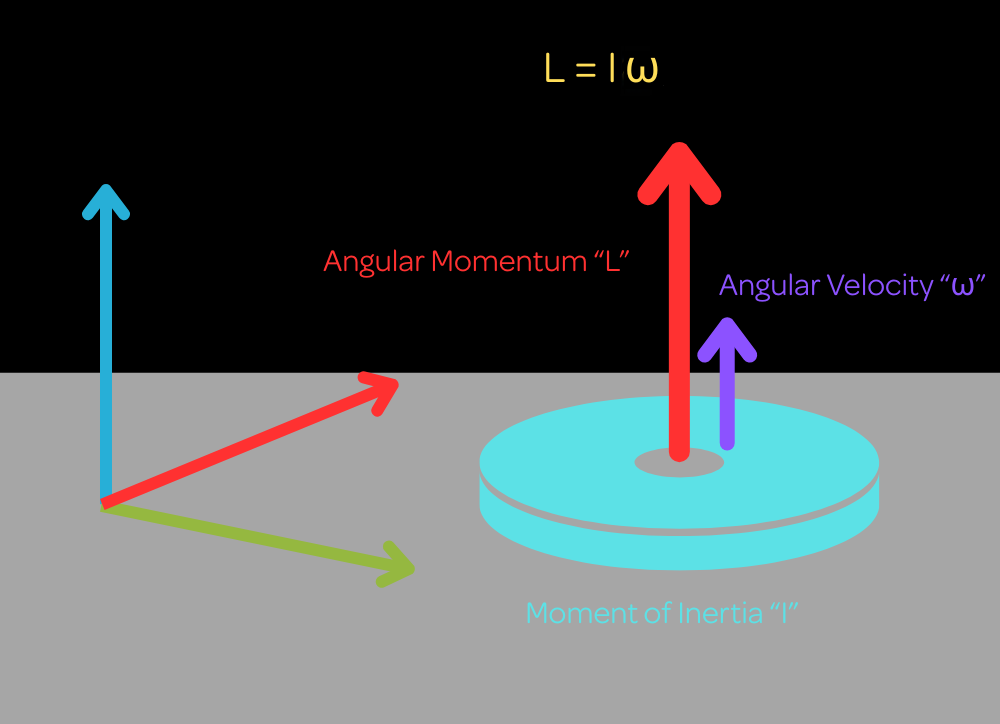
The exact reason for all the directions requires a pretty lengthy explanation, so just know this. A counterclockwise rotation means that the angular velocity vector is upwards, out of the plane of the page, and a clockwise rotation means the vector is into the page. Since angular momentum is directly proportional to angular velocity, the angular momentum is in the same direction as the angular velocity vector. Why is this? Well, it has to do with the cross product. We have something called the right-hand rule for evaluating the direction of quantities that have to do with cross products as well as angular quantities in general. You might have noticed that angular velocity points out of the plane of rotation. This means it either points out of the page or into the page.
The way we figure out the direction of angular velocity is actually a cross product (the strict definition is $v = \omega \times r$), but it can be simplified because of the nature of rotation. To find the direction of the angular velocity, we simply curl our right hand around the axis of rotation, making sure our fingers curl in the direction of rotation. The direction that our thumb points in is the direction of the angular velocity vector. Simple! Just don't use your left hand, because that'll give you the wrong direction. Sorry if you're left handed!
Since angular momentum is related to angular velocity as $ L = I \omega$, the direction of angular momentum is the same as the direction of angular velocity. Remember this right-hand rule, because there will be more in the future...
Key Examples
Let's test our knowledge of angular momentum with a few practice problems. The concept can seem pretty abstract until we actually apply it. We start off by actually analyzing the situation we saw in the demo earlier. A blob of clay with a mass of 0.5 kg is launched at a rigid rod that is free to rotate around its center with a velocity of 3.5 m/s. The rod has a mass of 2.0 kg and a length of 1.0 meters. If the blob impacts at a distance of 0.3 meters from the center of the rod, what is the angular velocity of the blob-rod system after the collision?
If we analyze the system's angular velocity around the pivot point, there is no net external torque. However, if we use any other point as a reference, there will be some net external torque because the pivot point has to exert some force to keep the rod in place. Pivots can't exert torque about themselves, but they do exert quite a significant amount of force. (Think about it this way: if the pivot weren't there, the blob and rod would move off together to the right.)
With this realization in place, we can calculate the amount of initial angular momentum around the pivot. We are calling the clay's mass $m$, the distance it hits at $h$, and its initial velocity $v$. We will also define the rod's mass to be $M$ and its length as $L$.
$$ L = mvh$$
This should equal the total final momentum. This involves not only the rod rotating around the pivot, but also the clay stuck to the rod's rotation. This means that we have the rod's moment of inertia, along with the moment of inertia of the clay rotating a distance $h$ from the pivot point. You can assume this collision is inelastic because clay tends to stick to things.
$$ L = \left( \dfrac{1}{12}ML^2 + mh^2 \right) \omega = mvh $$
Now, we solve for $\omega$. You can plug in every known value beforehand so you don't have to deal with so many variables.
$$ \omega = \bbox[3px, border: 0.5px solid white] {2.48~\textrm{rad/s} } $$
If we analyze the system's angular velocity around the pivot point, there is no net external torque. However, if we use any other point as a reference, there will be some net external torque because the pivot point has to exert some force to keep the rod in place. Pivots can't exert torque about themselves, but they do exert quite a significant amount of force. (Think about it this way: if the pivot weren't there, the blob and rod would move off together to the right.)
With this realization in place, we can calculate the amount of initial angular momentum around the pivot. We are calling the clay's mass $m$, the distance it hits at $h$, and its initial velocity $v$. We will also define the rod's mass to be $M$ and its length as $L$.
$$ L = mvh$$
This should equal the total final momentum. This involves not only the rod rotating around the pivot, but also the clay stuck to the rod's rotation. This means that we have the rod's moment of inertia, along with the moment of inertia of the clay rotating a distance $h$ from the pivot point. You can assume this collision is inelastic because clay tends to stick to things.
$$ L = \left( \dfrac{1}{12}ML^2 + mh^2 \right) \omega = mvh $$
Now, we solve for $\omega$. You can plug in every known value beforehand so you don't have to deal with so many variables.
$$ \omega = \bbox[3px, border: 0.5px solid white] {2.48~\textrm{rad/s} } $$
I also want to talk about a famous angular momentum example: the ice skater. Conjure in your mind the image of an ice skater spinning with their arms extended on an ice rink. When they pull their arms inward, their angular velocity increases. Why is this? Well, angular momentum provides us with the answer.
The ice skater's total angular momentum cannot change, because there is no net external torque. Recall that angular momentum is defined as $L = I \omega$. If they pull their arms inwards, their moment of inertia decreases ($r$ decreases), so their angular velocity must increase to compensate.
Sometimes, there is no obvious axis of rotation, which can allow us to conclude that the angular momentum will be conserved in all interactions. In these cases, we can actually neglect to define a singular axis of rotation and instead compute the angular momentum about the center of mass. It's difficult to explain this with words, so I'll use an example.
A disk of mass $m$ and radius $r$ spins with some angular velocity $\omega_0$. A point object of mass $m$ is placed on the edge of the disk and eventually comes to rest relative to the disk. What is the final angular velocity of the system, in terms of $omega$?
Did you say $\omega_0 / 3$? If so, you fell into a very common pitfall! See, the disk isn't constrained to rotate around its center. It can rotate any way it wants! If the disk and mass spin together, they will spin around their center of mass! The moment of inertia must then be calculated relative to that point, not the center of the disk.
The center of mass is located $r/2$ from the center of the disk. Thus, we can write the moments of inertia of the disk and point mass:
$$ I_{disk} = \dfrac 12 mr^2 + m \left( \dfrac{r}{2} \right)^2 = \dfrac34 mr^2 $$ $$ I_{mass} = m \left( \dfrac{r}{2} \right)^2 = \dfrac14 mr^2 $$
Therefore, the total moment of inertia is:
$$ I = mr^2 $$
We can then write our conservation of angular momentum. We still calculate initial angular momentum of the disk in the normal way, because it rotates around its center initially. We can change the axis of reference later on because there is no net external torque anywhere, and we've chosen the system such that angular momentum will be conserved.
$$ \dfrac 12 mr^2 \omega_0 = mr^2 \omega_f $$ $$ \omega_f = \bbox[3px, border: 0.5px solid white] {\omega_0 /2} $$
Did you say $\omega_0 / 3$? If so, you fell into a very common pitfall! See, the disk isn't constrained to rotate around its center. It can rotate any way it wants! If the disk and mass spin together, they will spin around their center of mass! The moment of inertia must then be calculated relative to that point, not the center of the disk.
The center of mass is located $r/2$ from the center of the disk. Thus, we can write the moments of inertia of the disk and point mass:
$$ I_{disk} = \dfrac 12 mr^2 + m \left( \dfrac{r}{2} \right)^2 = \dfrac34 mr^2 $$ $$ I_{mass} = m \left( \dfrac{r}{2} \right)^2 = \dfrac14 mr^2 $$
Therefore, the total moment of inertia is:
$$ I = mr^2 $$
We can then write our conservation of angular momentum. We still calculate initial angular momentum of the disk in the normal way, because it rotates around its center initially. We can change the axis of reference later on because there is no net external torque anywhere, and we've chosen the system such that angular momentum will be conserved.
$$ \dfrac 12 mr^2 \omega_0 = mr^2 \omega_f $$ $$ \omega_f = \bbox[3px, border: 0.5px solid white] {\omega_0 /2} $$
One more short concept to talk about, then we're done with this lesson. You might recall that when we talked about linear momentum, we also talked about impulse. Well, there is such a thing as angular impulse, but it is rather less commonly discussed.
$$ \tau_{av} \cdot t = \Delta L $$
$$ \int_{t_0}^{t_f} \tau ~dt = \Delta L $$ Angular impulse isn't important enough to get its own letter. It's not a concept that is explored very often, because it is so similar to regular impulse (which was already unimpressive, in my eyes). It even takes an analogous form.
One last thing before I end this lesson. Angular impulse can be found as the area under the torque versus time graph, just like impulse could be found as the area under the force versus time graph.
I wish there was more to say about this topic, but this is really it. Angular impulse is a concept you should know, but it isn't radically different from regular impulse. If it ever appears, you should be able to deal with it in the same way you dealt with impulse in the past. Conservation of angular momentum is a much more interesting and nuanced topic.
This is also the end of our rotation unit. We now have the framework to deal with rotating objects, which expands our problem-solving capability greatly. We're going to put everything we've learned so far to use in the next unit.
Angular Impulse
Angular impulse is defined as the change in angular momentum, and is calculated by multiplying (average) torque by time. The precise definition involves an integral.$$ \tau_{av} \cdot t = \Delta L $$
$$ \int_{t_0}^{t_f} \tau ~dt = \Delta L $$ Angular impulse isn't important enough to get its own letter. It's not a concept that is explored very often, because it is so similar to regular impulse (which was already unimpressive, in my eyes). It even takes an analogous form.
One last thing before I end this lesson. Angular impulse can be found as the area under the torque versus time graph, just like impulse could be found as the area under the force versus time graph.
I wish there was more to say about this topic, but this is really it. Angular impulse is a concept you should know, but it isn't radically different from regular impulse. If it ever appears, you should be able to deal with it in the same way you dealt with impulse in the past. Conservation of angular momentum is a much more interesting and nuanced topic.
Conclusion
That concludes our lesson on angular momentum (and rotational kinetic energy, I guess). This concept is actually a bit different from regular momentum and is a separate idea. Conservation of angular momentum is definitely more nuanced and difficult at times than conservation of linear momentum, but it can still definitely be conquered.This is also the end of our rotation unit. We now have the framework to deal with rotating objects, which expands our problem-solving capability greatly. We're going to put everything we've learned so far to use in the next unit.