this is designed for the about link on the homepage to auto expand
Torque
Introduction
You might have heard the term "torque" when talking about engines, alongside horsepower. The second is just a measure of power, which we know how to deal with. But torque, on the other hand, determines how powerful the initial acceleration of the car is. Engines that can produce a higher torque can accelerate much faster, usually at the expense of having a lower top speed. In simple terms, it's rotational force.
The idea of torque is more simple than the concepts behind it. First, I want to introduce a new vector operator that is required to understand torque and many other parts of this chapter, the cross product.
Cross Product
The cross product is represented with a multiplication sign, written as $ \vec{a}\times\vec{b}$. It measures orthogonality as opposed to how the dot product measures how parallel vectors are. It's kind of the opposite of the dot product in that sense, but it's more nuanced than that.
This concept is actually vector calculus, involving complex topics such as the determinant of a three-dimensional matrix. You can explore these definitions on your own, but this level of understanding is unnecessary for this level of physics.
The cross product is geometrically defined as the area made by the parallelogram that has the two vectors as the two different legs. This is its magnitude, but unlike the dot product it is also a vector. This means that we have to account for the direction, which is defined as perpendicular to both vectors being operated on. How is that possible? In three dimesions, that's how.
Now is a good time to introduce the mathematical definition of the cross product. It considers two vectors with an angle $\theta$ between them.
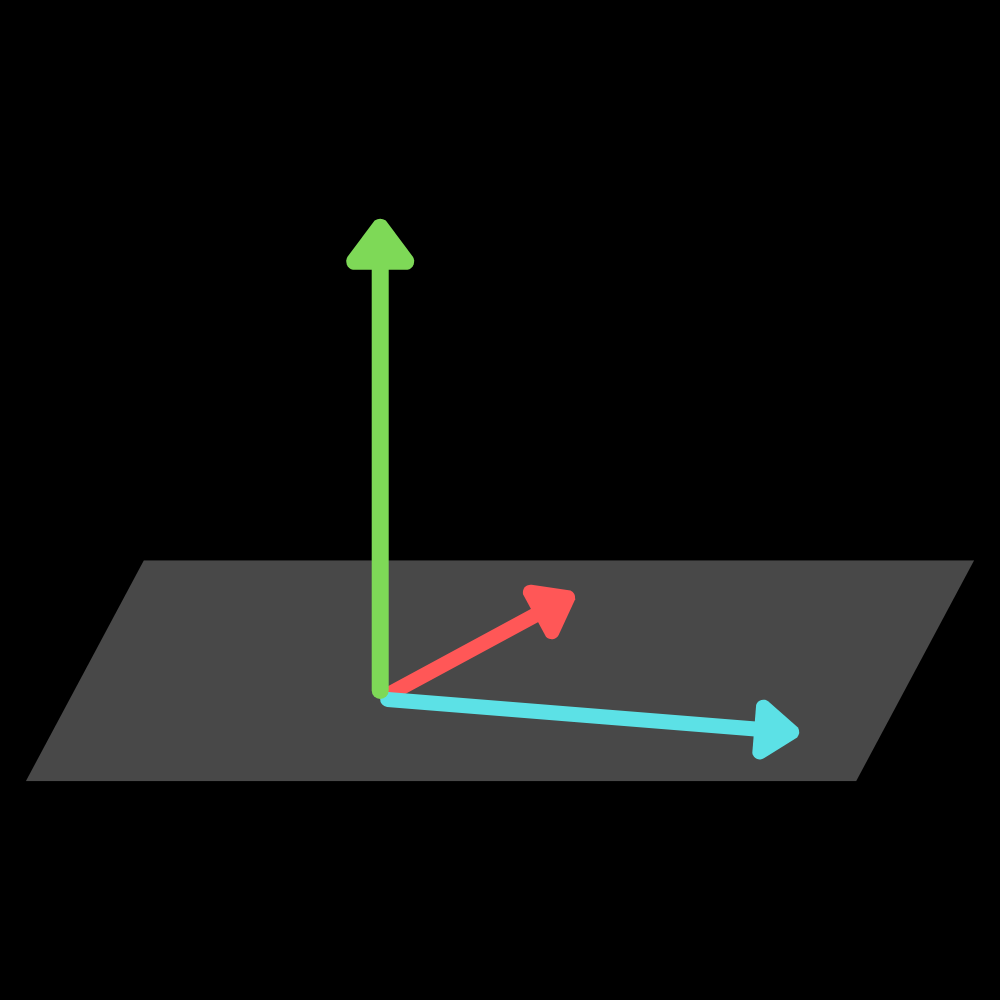
$$ \vec{a} \times \vec{b} = |\vec{a}||\vec{b}| \sin \theta$$ Of course, I've left out the direction, but it's perpendicular to both vectors. Now's the proper time to show you what that actually means. Figure 1: The cross product in green. There is a plane at the bottom of the page to indicate perspective. You see now that the cross product is inherently three-dimensional in nature. This formula is enough for our torque purposes, but if you plan on going on into more advanced topics a more thorough discussion of this topic would be required.
Essentially, what's happening with the formula is we are taking the perpendicular component of either vector and multiplying it with the magnitude of the other. Thus, in order to calculate the cross product given two vectors we want to find the component of one that is perpendicular to the other. This is what we will do for torque, and this is what the vast majority of physics problems that involve the cross product expect you to do.
While an algebraic technique exists as well, this is the technqiue far more commonly seen in physics, and it's the one I'll use to explain torque. The algebraic formula is also exceedingly long and difficult to memorize, unless you have familiarity with three-dimensional matrices. The cross product is kind of the opposite of the dot product. Instead of measuring how parallel two vectors are, it measures how perpendicular they are. This is starting to make the cross product look just like the dot product, but there's one key difference.
The result of a dot product is a scalar quantity. But the result of a cross product is a vector! The direction of this vector is defined such that it is perpendicular to both of the vectors in the operation. But wait, you might be saying, how is that possible? In three, dimensions, of course!
Figure 1: The cross product in green. The grey rectangle is a plane that provides perspective for the illustration, which is in three dimensions. Now do you see what I'm talking about? The magnitude of the cross product is equivalent to the area enclosed by the parallelogram defined by the two vectors. The math definition is as follows, and looks similar to the one for the dot product. However, keep in mind that this one produces a vector!
$$ \vec{a} \times \vec{b} = |\vec{a}||\vec{b}| \sin \theta$$ You don't see the direction here because there's no good way to represent it with algebraic symbols.
This is what we're going to be using to evaluate torque. More specifically, the formula states that the cross product is equal to the product of one vector's magnitude and the magnitude of the component of the other vector perpendicular to the first. The order doesn't matter.
Definition
Now, we can actually begin our discussion of torque. As you probably have guessed, the definition of torque contains a cross product.
$$ \vec{\tau} = \vec{r} \times \vec{F} $$ That's the Greek letter tau. Now, this just simply represents torque as the cross product of the radius vector and force. But what does it actually mean, and why do we care about any of this at all?
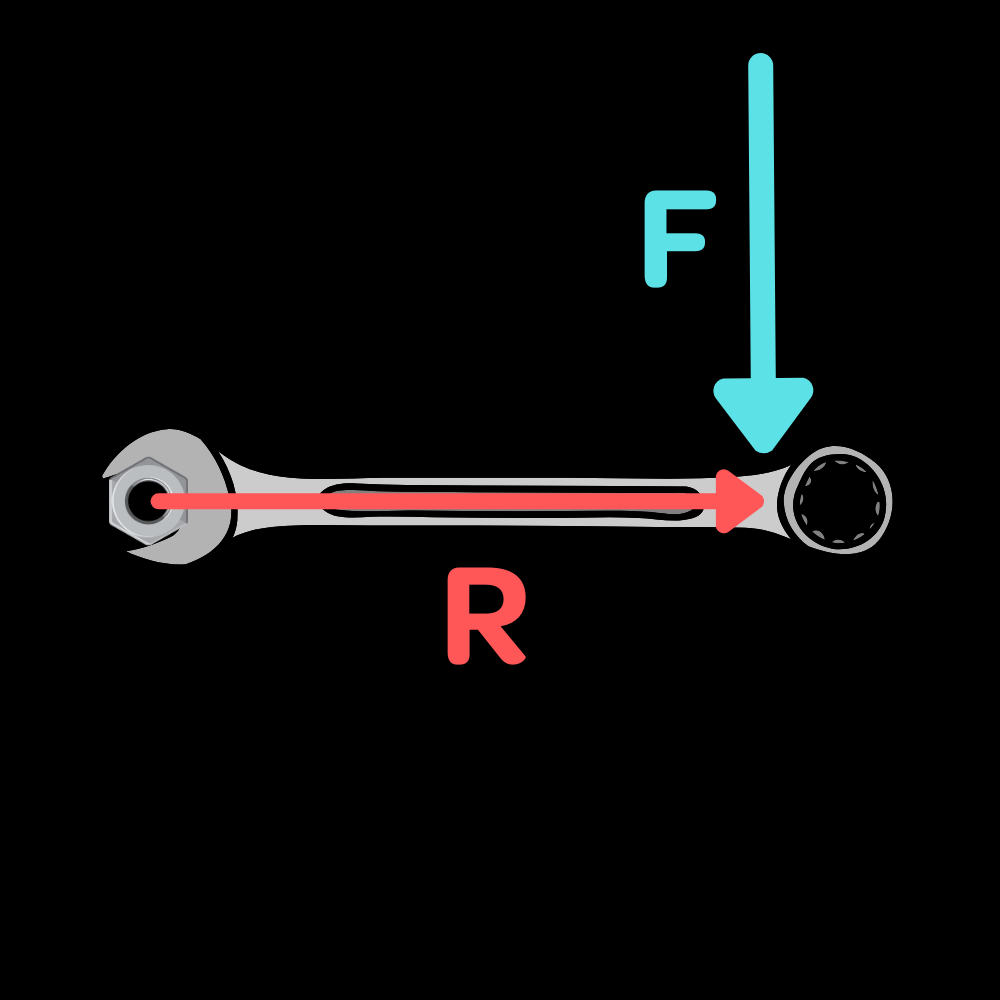
The radius vector $\vec{r}$ is measured from the axis of rotation (where the object rotates) to the point where the force is applied. It points from the axis of rotation to the point of force application, and comes first in the cross product.
Figure 2: The components of torque on a wrench. The wrench is a commonly-used tool to demonstrate how torque works. Think about why we always push on the end of the wrench furthest from the wrench's head. It makes it easier to turn the bolt, right? Well, this is because the radius vector $\vec{r}$ is greatest at that point! And, it should go without saying that if we push harder the bolt will turn faster, since force is the other part of torque.
Here's a simple demonstration of the wrench made in Matter.js for you to play with and to get a feel of how it works. The red square is for you to pull on and see how pulling at an angle affects the rotation of the virtual wrench. This is important for building intuition if you don't handle wrenches often, and you can come back to this to verify the results I'm presenting later.
Torque Demo
What if we push at an angle instead of directly downwards? Well, if you've worked with a wrench (if not in real life, at least with the simulation) you know that we don't tend to do this. But why? A problem that hinges on the definition of the cross product should explain this.
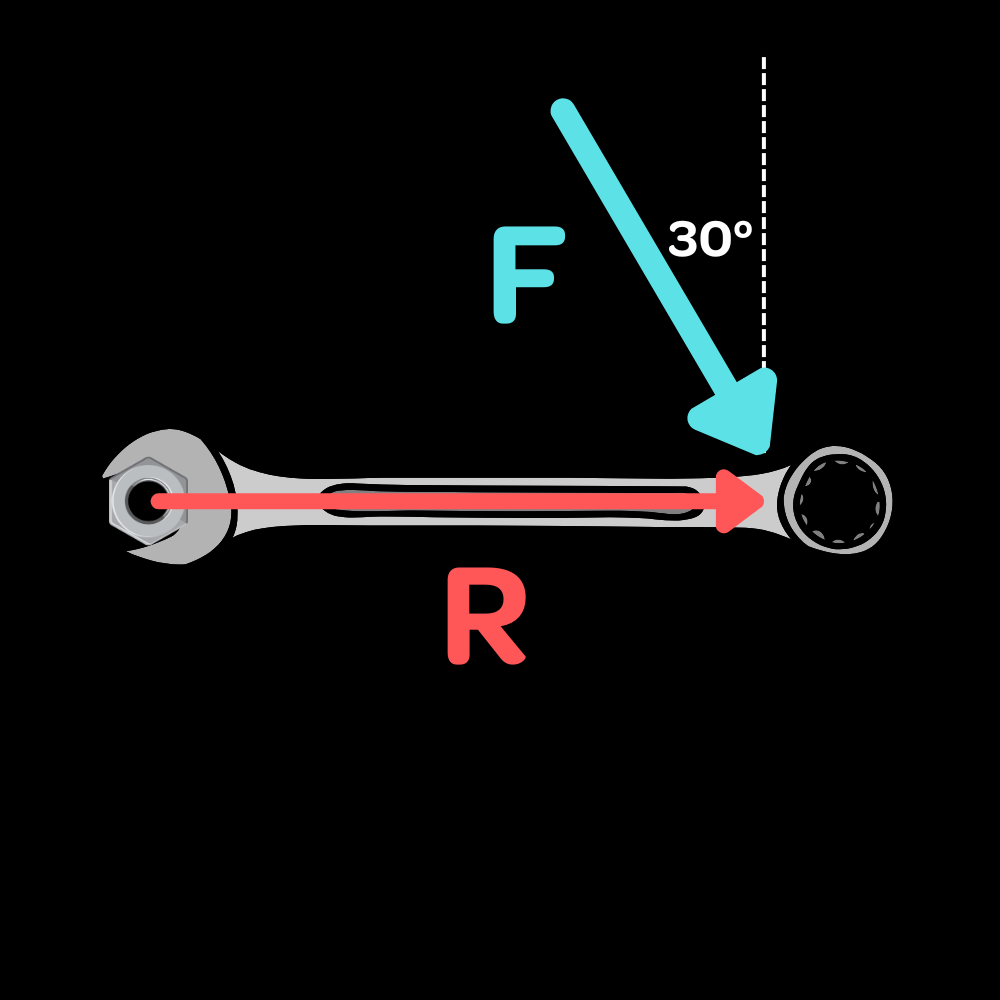
A man pushes on a wrench of length 0.7 meters at an angle of 30° left of the vertical while it is horizontal at the end of the wrench. How much torque is being exerted on the bolt if the man pushes with a force of 100 N?
Figure 3: Pushing at an angle. Recall that torque is defined as a cross product. This means that we cannot simply multiply the two vectors, but rather have to account for the angle in between them. If we just strictly follow the formula, we will get:
$$ \tau = \vec{r} \cross \vec{F} = |\vec{r}||\vec{F}|\sin 30° = \bbox[3px, border: 0.5px solid white]{35 ~\textrm{N} \cdot \textrm{m} }$$ But what's the reason we do this? Well, only the component of the force that is perpendicular to the radius actually has an effect on the torque. The parallel component doesn't contribute because pushing along the length of a wrench won't make it turn. What's really happening here is we're multiplying the radius by the component of the force that is perpendicular to it, because that's the only part that causes a torque!
You might have noticed something back there. I wrote my answer with the unit of $\textrm{N} \cdot \textrm{m}$, but this is dimensionally equivalent to joules! (Think back to the definition of work.) However, torque and energy are obviously not the same thing, so this is a case where dimensionality does not mean equality! In other words, just because two quantities are dimensionally equivalent does not mean they are the same thing.
Always use the unit of joules ($\textrm{J}$) for work and energy, and always use the unit of Newton-meters ($\textrm{N} \cdot \textrm{m}$) for torque. Dimensional analysis can break down a little bit here because of this, but most of the time it should still be a good way of checking your answers. Another thing to note about this unit is that the radian is technically dimensionless, only being written because we don't want to leave one part of our unit empty. (Imagine if rad/s was just /s!) If you've ever used a wrench, you know that pushing at an angle tends to be less effective than pushing perpendicular to the arm. The definition of torque helps explain why this is. Consider that we're now pushing on that same wrench, but at an angle of 30° to the vertical.
Figure 3: Pushing at an angle. If you've ever tried this, you know it's not as good as just pushing straight down. Part of that is certainly due to how it's easier to exert force downwards since gravity helps you, but even if the force were the same the torque would be less. Recall the definition of torque as a cross product:
$$ \tau = \vec{r} \times \vec{F} = rF\sin\theta $$ Do you see the $\sin \theta$? If you know trigonometry, you know that the sine function is a maximum at an angle of 90°, which is when you're pushing perpendicular! Any angle less than that produces a suboptimal amount of torque.
There's another, less mathematical way to think about this. Only the component of the force that's perpendicular to the wrench has any effect on the torque, because the component that's along the length of the wrench can't cause it to turn. Therefore, when we tilt the force at an angle, less of the force can contribute to the torque.
The unit of torque is Newton-meters ($\textrm{N} \cdot \textrm{m}$), which is dimensionally the same as energy but shouldn't be interchanged with it! They are not the same thing under any circumstances. This is why we use the unit of joules ($\textrm{J}$) for energy at all times: we don't want to confuse the two.
Force and radius being perpendicular is certainly nice and happens decently often, but we can't forgo those numerous cases where they aren't. Here, I'll present a general method that's used to compute torque for more complex cases, as well as explain a few tips for this topic. It's complex!
Lever Arm Method
The most common method you'll see involves using a lever arm, which is the component of the radius vector that is perpendicular to the force. There's a good graphical method of finding it, which involves an imaginary line called the line of action.
Wait! Didn't I explain for an entire paragraph about how only the perpendicular force causes a torque? Why are we now manipulating radius? Well, the reason is simple. We can do either, because the cross product doesn't care which vector you make perpendicular to the other. Thus, we usually just do whatever's convenient in any given scenario, whether that be manipulating force or displacement.
Okay, now I'll show you the lever arm and line of action method with a labelled diagram to help with my explanation.
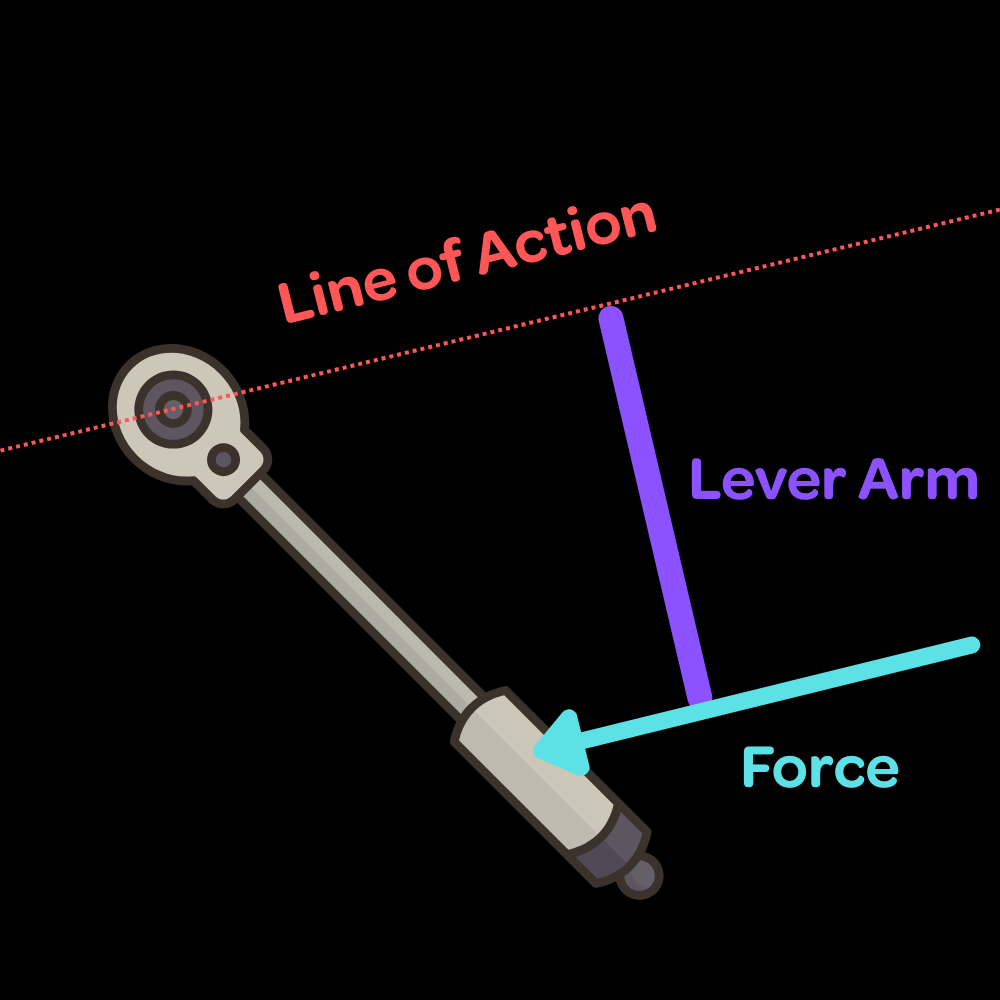
Figure 4: Contrary to popular belief, the lever arm is not the arm of a lever. Oh, and the device in the picture is called a torque wrench. It's a pretty neat tool. The line of action is found simply by drawing a (dotted) line through the point of rotation parallel to the direction of the force in question. It is not drawn along the direction of the radius vector, nor is it drawn exactly horizontal or vertical. Those are somewhat common misconceptions I see with this concept.
Once you've established the correct line of action, we can find the lever arm as the perpendicular distance between the line of action and the line that represents the force. You can also draw an imaginary line that extends along the force vector and sits on top of it if that helps. This line of action is perpendicular to both lines! Hopefully you can see that from the diagram.
This method of finding the torque should serve you well for most problems involving torque in some extent. It's a very generalized method that is designed to work in a lot of cases, which is why it is useful. If you feel your skills are up to the task, you can also forgo this method and instead manipulate either force or radius in order to get the torque depending on what's easier for the situation. However, if you want the comfort of a single method that works, stick with the line of action and lever arm.
Conclusion
This concludes our discussion of torque. Right now, there's not much we can do with it because it's just a small piece in a grander puzzle called rotational dynamics, but we'll definitely make good use of this quantity in the future. For now, make sure you know how to calculate torque, and you'll be set for this concept.
The next concept is one that is often quite foreign and new to people, because it's a rotational equivalent of ...mass? But, if you're ready we should move on to talking about the moment of inertia, the second key piece in our puzzle that takes the name of rotational dynamics.