Lessons
Problems
Getting Started
- About Us
- Getting Started
- Basic Algebra
- Metric Prefixes
- Trigonometry
- Index/Glossary
Mechanics
Kinematics
- Vectors
- Dimensional Analysis
- Position, Velocity, Acceleration
- One-Dimensional Motion/Free fall
- Two-Dimensional Motion/Projectile Motion
- Relative Velocity
Dynamics
- Newton's Laws
- Forces
- F=ma and Free-body Diagrams
- Inclined Planes and Pulleys
- Spring Forces
Circular Motion and Gravitation
- Centripetal Force/Acceleration
- Fictitious Forces
- Newton's Law of Universal Gravitation
- Kepler's Laws
Energy
- Dot Product
- Definition of "Work"
- Definition of Energy and Energy Conservation
- Types of Equilibrium
- Definition of Power
- Universal Gravitational Potential Energy
Momentum
- Impulse/Momentum Theorem
- Conservation of Linear Momentum
- Center of Mass
- Collisions
- Explosions
Rotation
- Rotational Kinematics
- Torque
- Moment of Inertia
- Rotational Dynamics
- Rolling Without Slipping
- Rotational Kinetic Energy and Angular Momentum
Oscillations
- Simple Harmonic Motion
- Spring-Block Oscillators
- Pendulums
- Other Oscillators
Fluids
- Properties of Fluids
- Pressure
- Fluid Flow
- Bernoulli's Principle
- Air Resistance and Drag
Electricity & Magnetism
Electrostatics
- Electric Charge
- Coulomb's Law
- Electric Fields
- Gauss's Law
Thermodynamics
Lessons
Problems
Getting Started
- About Us
- Getting Started
- Basic Algebra
- Metric Prefixes
- Trigonometry
- Index/Glossary
Mechanics
Kinematics
- Vectors
- Dimensional Analysis
- Position, Velocity, Acceleration
- One-Dimensional Motion/Free fall
- Two-Dimensional Motion/Projectile Motion
- Relative Velocity
Dynamics
- Newton's Laws
- Forces
- F=ma and Free-body Diagrams
- Inclined Planes and Pulleys
- Spring Forces
Circular Motion and Gravitation
- Centripetal Force/Acceleration
- Fictitious Forces
- Newton's Law of Universal Gravitation
- Kepler's Laws
Energy
- Dot Product
- Definition of "Work"
- Definition of Energy and Energy Conservation
- Types of Equilibrium
- Definition of Power
- Universal Gravitational Potential Energy
Momentum
- Impulse/Momentum Theorem
- Conservation of Linear Momentum
- Center of Mass
- Collisions
- Explosions
Rotation
- Rotational Kinematics
- Torque
- Moment of Inertia
- Rotational Dynamics
- Rolling Without Slipping
- Rotational Kinetic Energy and Angular Momentum
Oscillations
- Simple Harmonic Motion
- Spring-Block Oscillators
- Pendulums
- Other Oscillators
Fluids
- Properties of Fluids
- Pressure
- Fluid Flow
- Bernoulli's Principle
- Air Resistance and Drag
Electricity & Magnetism
Electrostatics
- Electric Charge
- Coulomb's Law
- Electric Fields
- Gauss's Law
Thermodynamics
Spring-Block Oscillators
Introduction
You should recall our previous discussion of the spring force and Hooke's Law, as well as our previous demo for that lesson. If you have a really good memory, you would remember I said that Matter.js does not have a built-in realistic spring force. This demo implements a mathematically accurate spring force demo by forcibly implementing Hooke's Law. See how the block oscillates.Spring-Block Oscillator Demo
This demo uses a realistic spring force, which you can see causes the block to oscillate practically indefinitely. You may also see that it oscillates back and forth around the equilibrium position, repeating its motion over time. This characterizes spring-block oscillators.
Proof of Simple Harmonic Nature
We want to recall Hooke's Law from our previous discussion of springs. As we've stated, it is a restoring force that tends to pull objects back to equilibrium. I've put the definition here, but you remembered it, right? (Shameless guilt trip)$$ F = -k x $$
We can see that this is the only force acting on these objects in a spring-block oscillator system. With a little bit of algebra, we can show that this satisfies the conditions for SHM and find the angular frequency of the spring-block system. Recall Newton's Second Law in this case:
$$ ma = -k x $$ $$ a = -\dfrac{k}{m} x $$
We also want to realize that this applies for combinations of springs as well. In reality, we should be using $k_{eff}$ to denote the effective spring constant. Of course, when springs are actually attached to a block it's no longer just as simple as parallel and series. You can attach a spring to both sides of a block! Intuition and just basic logic/common sense should serve you pretty well in most of these cases.
(Attaching it to both sides of the block effective makes the springs stronger, so you add the constants together as if the springs were in parallel. But you got to that conclusion yourself, right?)
Now, recall that we said in general the formula for simple harmonic motion took the form:
$$ a = - \omega ^2 x $$
Therefore, we can conclude here that the angular frequency for a spring-block oscillator depends on the mass and spring constant.
$$ \omega = \sqrt{\dfrac{k}{m} } $$
Characteristics of Spring-Block Oscillators
Of course, now that we have the angular frequency, we can also write the frequency and period of oscillation in terms of $m$ and $k$. This involves nothing more than a direct substitution into the equations we've been introduced to in the previous chapter:$$ T = \dfrac{2\pi}{\omega} = 2\pi \sqrt{\dfrac{m}{k} } $$ $$ f = \dfrac{1}{T} = \dfrac{1}{2\pi} \sqrt{\dfrac{m}{k} } $$
These can be applied to the period or frequency of any arbitary spring-block oscillator system. However, this information is too general. We want a complete solution of the situation, where we can predict the mass's position, velocity, and acceleration at any point in time. This is where sinusoidal functions come in to save the day.
Quick disclaimer: you probably won't know everything I'm talking about here at a conceptual level. The information I'm about to give does rely pretty heavily on knowledge of sinusoidal functions and trigonometry, but is foundational enough that I had to include it. If you don't understand, feel free to skip over it.
First, we need to set a few ground rules. There is a new quantity called the amplitude, which is simply the furtherst the block gets from the equilibrium point. We represent it with the letter $A$. We are also assuming that we start the particle off with no initial velocity at some distance from the equilibrium point. We can then describe the position, velocity, and acceleration of the function as:
$$ x(t) = A \cos (\omega t) $$ $$ v(t) = - \omega A \sin (\omega t) $$ $$ a(t) = - \omega^2 A \cos (\omega t) $$
If we start the particle off at the equilibrium point with some velocity, the equations look slightly different. If you understand sine functions well, you should be able to tell why and what's going on. Think about how the objects move as a guide to analyzing these equations.
$$ x(t) = A \sin (\omega t) $$ $$ v(t) = \omega A \cos (\omega t) $$ $$ a(t) = - \omega^2 A \sin (\omega t) $$
Here are the actual graphs in desmos. You can adjust the parameters to see what happens!
Recall that $\omega = k/m$. If you look closely, you'll see that both sets of equations satisfy the essential relation $ a = - \omega ^2 x $, which means they are consistent with the conditions for SHM. Moreover, we can also see that velocity is maximum whenever acceleration and displacement are zero, and vice versa. But where did these random sine functions come from?
The way we derive these equations requires some pretty advanced calculus, so just take these for given. Besides, from looking at the motion of a spring it's relatively intuitive to see that these are true equations. Now, the gears inside your head are probably spinning as you calculate derivatives to verify that the positions, velocities, and accelerations match up properly. (Hint hint, verify this!) This is easy enough to see, but how did we arrive at these equations from the differential equation?
$$ \dfrac{d^2 x}{dt^2} = - \dfrac{k}{m} x $$
Well, solving this requires the use of very advanced math because it's a second-order differential equation. So unfortunately, I cannot explain it to you at this level. You will just have to take it for given. However, it's not hard to see that these equations are true just by looking at the motion of the mass attached to a spring.
Practice Problem
With this information having been fed to you, we are in a good position to attempt a practice problem. I've decided to give you a multi-stage aerobic capacity test — I mean mutli-part problem that progressively gets more difficult as you progress. A block of mass $m = 2.0 ~\textrm{kg}$ is attached to a horizontal spring of spring constant $k = 1520~\textrm{N/m}$.
a) What is the period?
b) If the maximum displacement from equilibrium is $A = 0.2 \textrm{m}$, what is the maximum spring force?
c) What is the maximum possible potential energy?
d) What is the maximum possible kinetic energy?
e) What is the total energy?
Happy solving!
First, we find the period with a simple substitution of numbers into the equation we got earlier.
$$ T =\dfrac{2\pi}{\omega} = 2\pi \sqrt{\dfrac{m}{k} }$$ $$ T = \bbox[3px, border: 0.5px solid white] {0.228~\textrm{s} }$$
That's part a) done. Now, the next part is relatively simple as well. The spring force just depends on the stretch from equilibrium, so the maximum possible spring force is just the spring constant times the amplitude.
$$ F = kA = \bbox[3px, border: 0.5px solid white]{304 ~\textrm{N} } $$
We don't put a direction sign here because we only care about magnitude. Next, we need to find the spring potential energy. This is yet another simple algebraic plug-in. Recall that the spring potential energy is defined by $U_s = \dfrac12 kx^2$.
$$ U_s = \dfrac12 kA^2 = \bbox[3px, border: 0.5px solid white] {30.4 ~\textrm{J} } $$
Now, what about part d)? We're not given any information on the kinetic energy! Well, there are two ways to do this. I'll show that they're the same. The first is to look back at our time-dependent equation for velocity and see that there is a maximum velocity whenever displacement is zero. Therefore, we can conclude due to the nature of sine functions that $v_{max} = \omega A$.
$$ K = \dfrac 12 m (\omega A )^2 = \dfrac 12 m \left( \dfrac{k}{m} \right) A^2$$ $$ K = \dfrac k A^2 = \bbox[3px, border: 0.5px solid white] {30.4 ~\textrm{J} } $$
The two expressions for maximum potential and kinetic energy are equivalent! This should tell us that mechanical energy is conserved in this system, as we would probably expect. Spring forces are conservative, after all, and there are no dissipative forces acting on the system. With this revelation, we can easily do the last part of the problem.
$$ E = \bbox[3px, border: 0.5px solid white] {30.4 ~\textrm{J} }$$
a) What is the period?
b) If the maximum displacement from equilibrium is $A = 0.2 \textrm{m}$, what is the maximum spring force?
c) What is the maximum possible potential energy?
d) What is the maximum possible kinetic energy?
e) What is the total energy?
Happy solving!
First, we find the period with a simple substitution of numbers into the equation we got earlier.
$$ T =\dfrac{2\pi}{\omega} = 2\pi \sqrt{\dfrac{m}{k} }$$ $$ T = \bbox[3px, border: 0.5px solid white] {0.228~\textrm{s} }$$
That's part a) done. Now, the next part is relatively simple as well. The spring force just depends on the stretch from equilibrium, so the maximum possible spring force is just the spring constant times the amplitude.
$$ F = kA = \bbox[3px, border: 0.5px solid white]{304 ~\textrm{N} } $$
We don't put a direction sign here because we only care about magnitude. Next, we need to find the spring potential energy. This is yet another simple algebraic plug-in. Recall that the spring potential energy is defined by $U_s = \dfrac12 kx^2$.
$$ U_s = \dfrac12 kA^2 = \bbox[3px, border: 0.5px solid white] {30.4 ~\textrm{J} } $$
Now, what about part d)? We're not given any information on the kinetic energy! Well, there are two ways to do this. I'll show that they're the same. The first is to look back at our time-dependent equation for velocity and see that there is a maximum velocity whenever displacement is zero. Therefore, we can conclude due to the nature of sine functions that $v_{max} = \omega A$.
$$ K = \dfrac 12 m (\omega A )^2 = \dfrac 12 m \left( \dfrac{k}{m} \right) A^2$$ $$ K = \dfrac k A^2 = \bbox[3px, border: 0.5px solid white] {30.4 ~\textrm{J} } $$
The two expressions for maximum potential and kinetic energy are equivalent! This should tell us that mechanical energy is conserved in this system, as we would probably expect. Spring forces are conservative, after all, and there are no dissipative forces acting on the system. With this revelation, we can easily do the last part of the problem.
$$ E = \bbox[3px, border: 0.5px solid white] {30.4 ~\textrm{J} }$$
Energy of Spring-Block Oscillators
Of course, we need a discussion of energy in here as well. It's only going to be a very brief discussion, but it is important nonetheless.What kinds of energy are in this system? Well, the block moves, so we definitely have kinetic energy. We also have a spring, so we have spring potential energy. (This was in the practice problem previously!) The two can be defined as $K =\frac12 mv^2$ and $U_s = \frac12 kx^2$. Therefore, we can write the total energy at any point as:
$$ E = \dfrac12 mv^2 + \dfrac12 k x^2 $$
You will recall that energy is conserved, and the total energy is just equal to the spring potential energy at maximum stretch. We want to show that this is true, however. To do so, we need to use the time-dependent equations for velocity and position that were given to us earlier.
$$ x(t) = A \sin (\omega t) $$ $$ v(t)= \omega A \cos (\omega t) $$ $$ E = \dfrac12 m(\omega A)^2 + \cos ^2 (\omega t) + \dfrac12 k A^2 \sin^2 \omega t $$
Now, we want to recall that $\omega = \sqrt{k/m}$ and substitute this result into our equations to simplify them.
$$ E = \dfrac12 m (k/m) A^2 \cos^2 (\omega t) + \dfrac12 k A^2 \sin^2 \omega t $$ $$ E = \dfrac12 k A^2 (\cos^2 (\omega t) + \sin^2 (\omega t)) $$
Using the Pythagorean identity, we can get rid of the trigonometric functions to be left with:
$$ E =\dfrac12 kA^2 $$
Using this equation and the equation for the total energy in the system as a sum of potential and kinetic energies, we can solve for the velocity of the object at any position by using basic energy conservation techniques. Now, we know that energy in this system will be conserved because the spring force is conservative and there are no dissipative forces such as friction or air resistance. This means that the total energy in the system will be equal the total spring potential energy of the spring when it is maximally stretched, or at a distance $A$ from the equilibrium.
$$ E = \dfrac12 kA^2 $$
Of course, at each instant in time the distribution between the different kinds of energy is different at each point in the motion. This is why we can write a more general form of the expression, combining the two kinds of energy that the block will have: potential and kinetic energy.
$$ E =\dfrac12 mv^2 + \dfrac12 kA^2 $$
Once we can figure out the total energy in a system, it becomes easy to use this formula to find the distribution of energy and the speed of the object at any position. What's more important, however, is understanding how the energy changes as the block moves.
As the block moves, energy is converted from potential to kinetic whenever the object speeds up, and is converted from kinetic to potential whenever it slows down. The total amount of energy in the system has to stay constant, however, meaning that they increase and decrease regularly. This is also a consequence of the fact that this is a type of simple harmonic motion and thus a kind of regular and periodic motion.
The energy involved in the system cannot really be used for basic analysis, but can be useful for finding velocity at certain positions. That's pretty much its only use outside of conceptual ones. The fact that the total energy has to be constant explains why velocity and position oscillate out-of-step: because one is related to kinetic energy and the other to potential. Their sum is constant, so one has to increase when the other decreases, and vice versa.
Vertical Spring-Block Oscillator
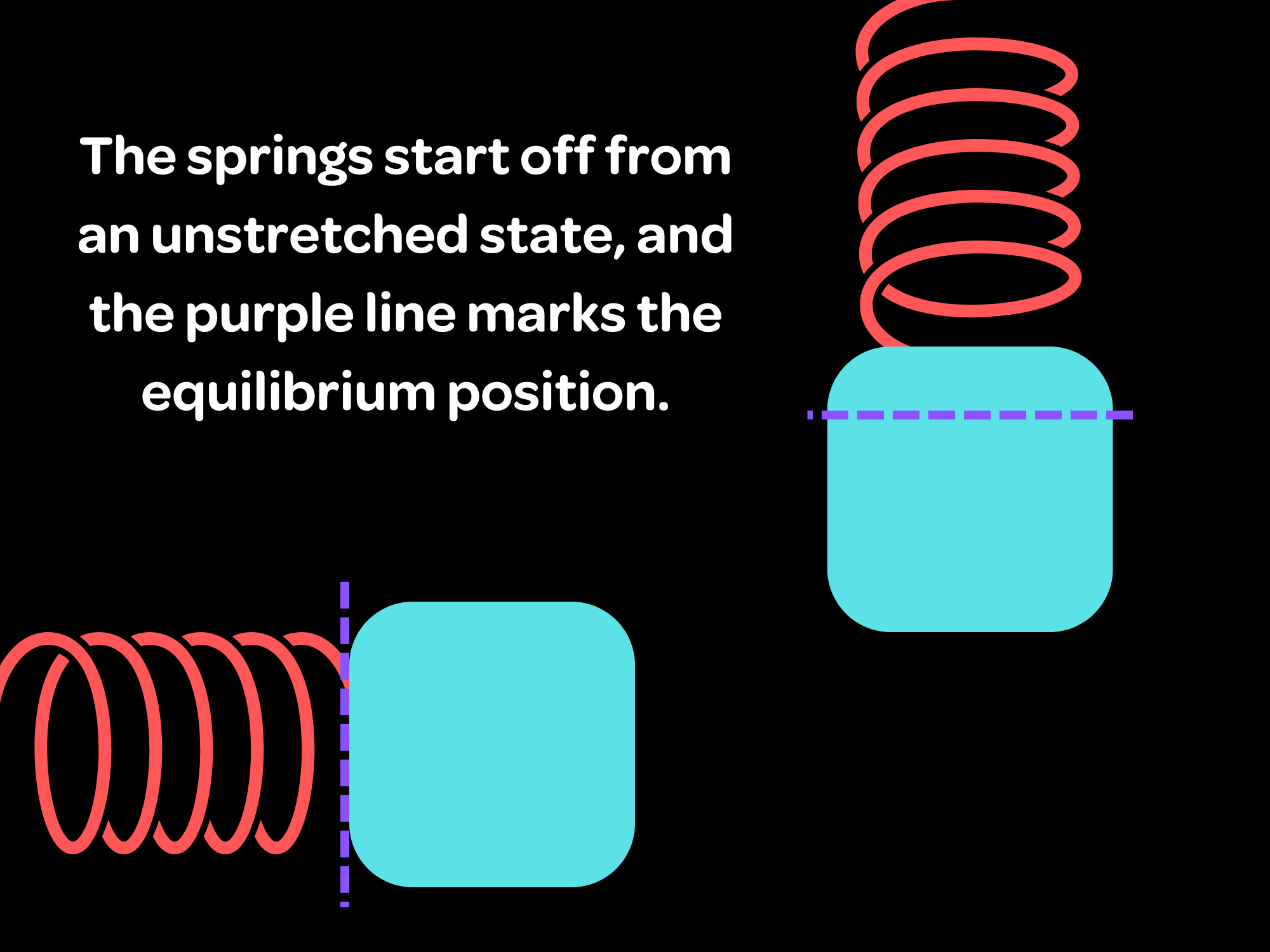
We have talked about horizontally oscilalting springs, but what about vertically oscillating ones? What changes in that case? Well, first off we have a force of gravity on the object which tends to pull it downwards. You might think that does something to affect the motion of the object.The issue is, the spring force is linear. All the gravity does is offset the spring's equilibrium position slightly. When displaced from that equilibrium, the spring will still tend to oscillate just as if it were horizontally placed. The vertical spring-block oscillator is practically analogous to the horizontal one, just with an offset equilibrium position. This can still trip you up if you're not careful, though.
The conceptual explanation might be good enough for some of you, but you can actually mathematically show that this result is true as well. However, this takes a bit more work and requires calculus. If you calculus students recall, we actually did show this in our types of equilibrium lesson. Go back there to see the work we did! Essentially, what we have to do is show that this is a stable equilibrium. You don't have to worry too much about the math behind it.
If you want to talk energy, this kind of system can be treated as equivalent to a horizontal spring-block oscillator as well. Even though the gravitational potential energy is changing, the spring potential energy also changes. Because the equilibrium position is at a point of nonzero spring stretch, we can define the total potential energy there to be zero. This way, we can write energies in the same way as we did for a horizontal oscillator.
I'm going to give you a problem to demonstrate exactly how the vertical spring-block oscillator works.
A vertical spring of spring constant $k = 600 ~\textrm{N/m}$ is attached on one end to a block of mass $M = 3.5 ~\textrm{kg}$ and the other end is attached to the ceiling. The block is released from rest while the spring is at its natural length. What is the amplitude and angular frequency of the resulting oscillations?
If the spring is released from natural length, it will "fall" down past its equilibrium position before coming back up. Remember, we consider amplitude as measured from the equilibrium position for the spring, and this one starts at rest length. This means that the amplitude is equal to the height that the spring starts at above the equilibrium position, which can easily be found. The equilibrium position is a distance $y$ below the rest length of the spring, where $y$ can be found using force analysis.
$$ mg = ky $$ $$ y =\dfrac{mg}{k} = A$$
This is also equal to our amplitude, as explained before. That means we've already solved the first part of the problem:
$$ A = \bbox[3px, border: 0.5px solid white]{5.72 ~\textrm{cm} } $$
Do note that I gave the answer in centimeters.
With that, we can now easily find the angular frequency. Remember, vertical and horizontal springs are completely analogous except for an offset in the equilibrium position caused by gravity, so the formula for the angular frequency is the same!
$$\omega = \sqrt{\dfrac{k}{m} } = \bbox[3px, border: 0.5px solid white]{13.1 ~\textrm{rad/s} } $$
If the spring is released from natural length, it will "fall" down past its equilibrium position before coming back up. Remember, we consider amplitude as measured from the equilibrium position for the spring, and this one starts at rest length. This means that the amplitude is equal to the height that the spring starts at above the equilibrium position, which can easily be found. The equilibrium position is a distance $y$ below the rest length of the spring, where $y$ can be found using force analysis.
$$ mg = ky $$ $$ y =\dfrac{mg}{k} = A$$
This is also equal to our amplitude, as explained before. That means we've already solved the first part of the problem:
$$ A = \bbox[3px, border: 0.5px solid white]{5.72 ~\textrm{cm} } $$
Do note that I gave the answer in centimeters.
With that, we can now easily find the angular frequency. Remember, vertical and horizontal springs are completely analogous except for an offset in the equilibrium position caused by gravity, so the formula for the angular frequency is the same!
$$\omega = \sqrt{\dfrac{k}{m} } = \bbox[3px, border: 0.5px solid white]{13.1 ~\textrm{rad/s} } $$